
About Me
From 2022, Huixu Dong(董会旭) is an 100 Young Professor(浙江大学新百人计划研究员/博导) in the Department of Mechanical Engineering at Zhejiang University, and the Director of Robotic Perception and Grasp Lab (RPGL) or Grasp Lab(GL) in short, and Dr.Dong obtained the title "Outstanding Overseas Youth"(国家高层次青年人才"海外优青"). I received the B.Sc degree in Mechatronics Engineering from Harbin Institute of Technology (HIT) in 2013 and obtained Ph.D. degree at Robotics Research Centre (RRC) of Nanyang Technological University (NTU) Singapore in 2018 advised by Prof.I-Ming Chen. Before joining Zhejiang University, I was a post-doctoral fellow of Robotics Institute (RI) at Carnegie Mellon University (CMU) and National University of Singapore (NUS).
Research Interests
I am mainly on robotic perception and manipulation, including robotic hand, multiple-modal perception for robotic hand, general-purpose grasp/dexterous manipulation(One core: Robotic grasp/manipulation; three fundamental points: robotic hand, multiple-model perception and dexterous manipulation:一个中心“机器人抓取与操作”,三个基本点“机器人手,多模态感知与操作规划”). I am interested in studying a challenging problem of efficiently understanding scenarios, reasoning about the grasping trajectory, and carrying out a reliable physical-environment grasping action for constructing an optimized system to perform robust manipulations for domestic, supermarket, warehouse and industrial setting applications. I am motivated by the above problems and working on Embody AI to offer highly resultful solutions through mathematical modeling, gripper design and control, visual perception as well as robotic learning. I have multiple high-quality publications in leading robotics journals and conferences, including International Journal of Robotics Research(IJRR), IEEE Transactions on Robotics (T-RO, long paper), Robotics: Science and Systems (RSS),Nature Communications(NC), IEEE/ASME Transactions on Mechatronics (T-MECH), IEEE Transactions on Automation Science and Engineering (T-ASE), IEEE Robotics and Automation Letters (RAL), RCIM, MMT, SO-RO, ICRA, and IROS. Furthermore, the developed dual-arm robots and underactuated robotic grippers have been successfully implemented in practical applications.
News
-
2026.March 7 : A paper on robotic manipulation via RL is accepted by IEEE Transactions on Automation Science and Engineering (IEEE T-ASE). Congratulations to Baoying.
-
2026.March 5 : My student Jianguo received a travel grant for ICRA 2026 from IEEE Robotics&Automation Society. Congratulations to Jianguo.
-
2026.February 14 : My student Weijie recieved a full PhD scholarship from Hongkong University. 恭喜我的学生Weijie收到了香港大学博士全额奖学金offer。
-
2026.February 5 : A paper on robotic gripper is accepted by IEEE Transactions on Automation Science and Engineering (IEEE T-ASE). Congratulations to Jihao and Jianguo.
-
2025.Nov 15 : My student Zhian recieved an intern offer from Alibaba Group. 恭喜我的学生Zhian收到了阿里巴巴达摩院实习offer。
-
2025.Nov 15 : My student Haonan recieved an offer from Ant Group Co., Ltd. 恭喜我的学生Haonan收到了蚂蚁集团的工作offer。
-
2025.Nov 15 : My student Xin Ke recieved an offer from Zhiyuan Innovation (Shanghai) Technology Co., Ltd. 恭喜我的学生Xin Ke收到了上海智元机器人公司的工作offer。
-
2025.November 10 : A paper on robotic gripper is accepted by IEEE Transactions on Robotics (IEEE T-RO). Congratulations to Haotian, Ziyi.
-
2025.October 31 : A paper on robotic manipulation is accepted by IEEE Transactions on Automation Science and Engineering (IEEE T-ASE). Congratulations to Yanzhe.
-
2025.October 31 : A paper on robotic multimode perception for robotic manipulation is accepted by Nature Communications (NC). Congratulations to Yanzhe, Haotian, Hao Wu.
-
2025.October 21 : A paper on robotic gripper is accepted by IEEE Robotics and Automation Letters (IEEE R-AL ). Congratulations to Jianguo and Jihao.
-
2025.October 9 : My student Baoying received 2025 National Scholarship (National Scholarship). Congratulations to Baoying.
-
2025.October 5 : A paper on robotic hand is accepted by IEEE/ASME Transactions on Mechatronics (IEEE/ASME T-MECH ). Congratulations to Ziyi and Keqi.
-
2025.September 11 : A paper on robotic grasp is accepted by the workshop "Benchmarking via Competitions in Robotic Grasping and Manipulation " at the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025). Congratulations to Xidan, Yuwei, Ziyi, Zhaohui. Xidan will give a talk.
-
2025.August 21 : A paper on robotic gripper and tactle perception is accepted by International Journal of Robotics Research (IJRR). Congratulations to Jihao, Keqi, Haotian.
-
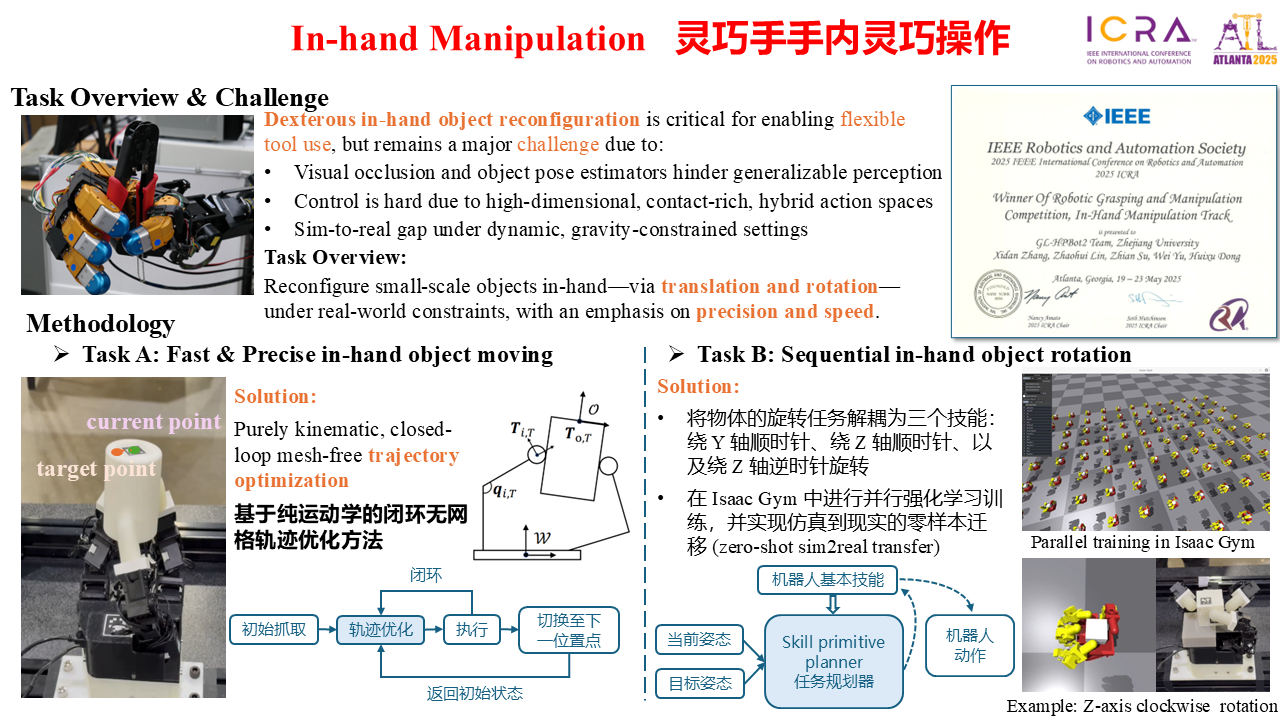
2025.August 6 : Our team recieved IEEE Grasping and Manipulation Competition(RGMC) 2025 in-hand manipulation competition award prize (IEEE ICRA 2025 ). Congratulations to Xidan, Zhaohui.
-
2025.August 5 : A paper on parallel mechanism is accepted by IEEE Robotics and Automation Letters (IEEE RA-L ). Congratulations to Jihao, Jianguo.
-
2025.July 28 : A paper on robotic perception is accepted by IEEE Robotics and Automation Letters (IEEE RA-L ). Congratulations to Weijie.
-
2025.July 26 : A paper on robotic manipulation is accepted by IEEE/ASME Transactions on Mechatronics (IEEE/ASME T-MECH ). Congratulations to Zhaohui.
-
2025.June 6 : A paper on robotic gripper is accepted by IEEE Robotics and Automation Letters (IEEE RA-L ). Congratulations to Zhian, Yicheng, Haotian.
-
2025.May 31 : Congratulations! This is truly outstanding news—please extend my warmest congratulations to my student Haotian who received the full P.h.D scholarship from King's College London(The Highest-Value Scholarship in the UK). 恭喜我的学生Haotian在诸多竞争者中脱颖而出,拿到了英国国王大学(G5)的最高博士全额奖学金。
-
2025.May 31 : Congratulations! This is truly outstanding news—please extend my warmest congratulations to my students Xidan and Zhaohui who have won the championship in the In-Hand Manipulation track of the 10th Robotic Grasping and Manipulation Competition at ICRA 2025 in Atlanta, USA. 我的学生Xidan 和Zhaohui 获得了美国亚特兰大ICRA2025 第十届机器人抓取与操作大赛:灵巧手内操作赛道决赛的冠军。
-
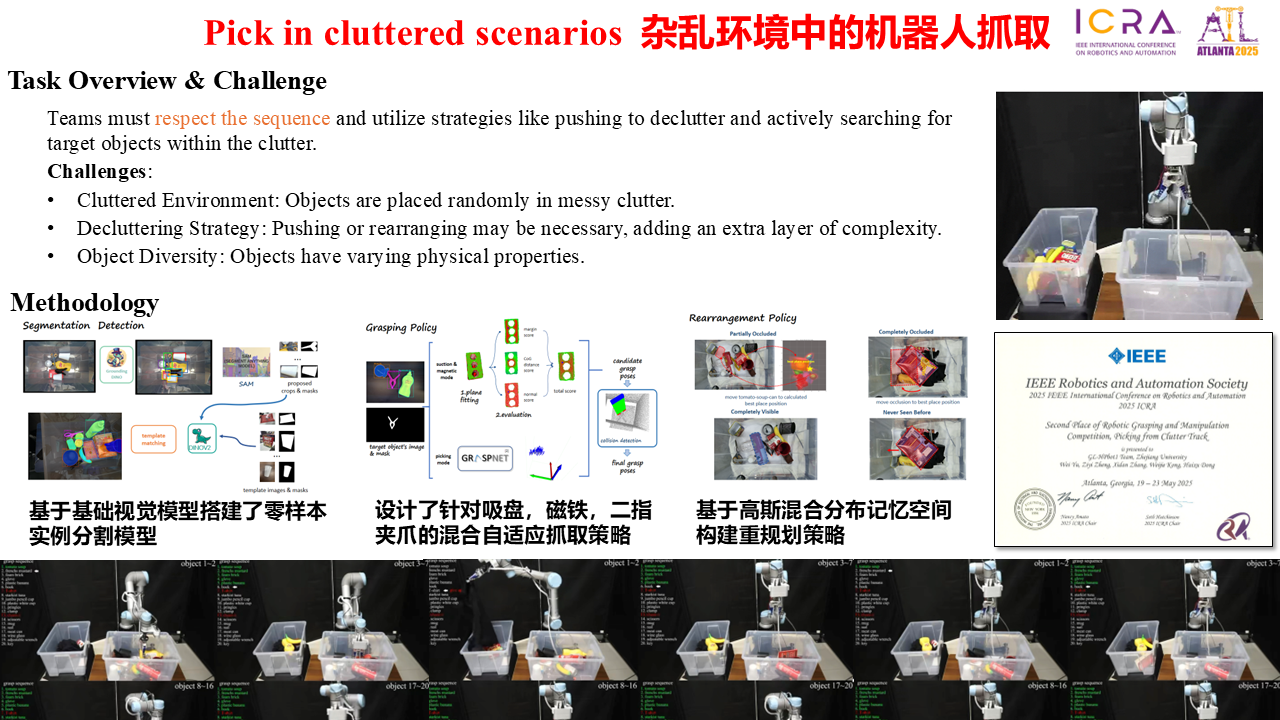
2025.May 31 : Congratulations! This is truly outstanding news—please extend my warmest congratulations to my students Yuwei and Xidan who have won second place in the Picking in Clutter track of the 10th Robotic Grasping and Manipulation Competition at ICRA 2025 in Atlanta, USA. 恭喜我的学生Yuwei和Xidan获得了美国亚特兰大ICRA2025 第十届机器人抓取与操作大赛:机器人抓取赛道决赛的亚军。
-
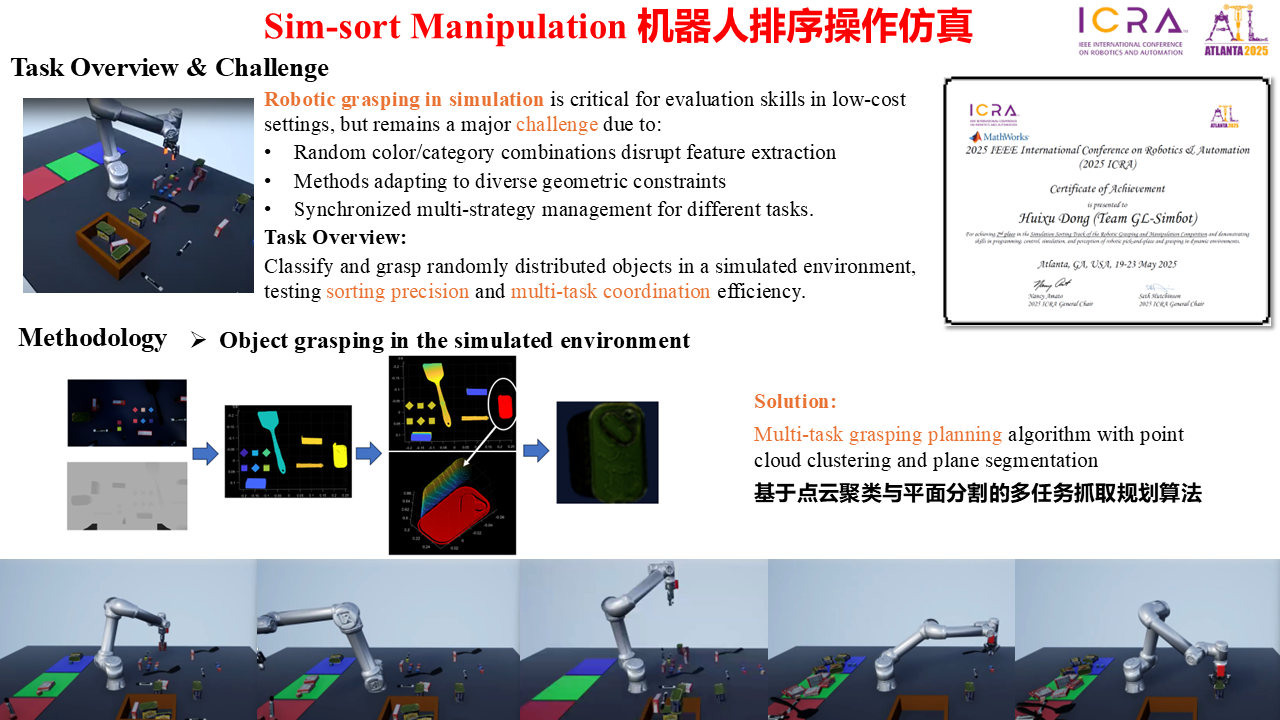
2025.May 31 : Congratulations! This is truly outstanding news—please extend my warmest congratulations to my students Zhian and Weijie who have won second place in the Simulation-Sorting Manipulation track of the 10th Robotic Grasping and Manipulation Competition at ICRA 2025 in Atlanta, USA. 恭喜我的学生Zhian和Weijie获得了美国亚特兰大ICRA2025 第十届机器人抓取与操作大赛:机器人操作仿真赛道决赛的亚军。
-
2024.Jun 1 : In the 2024 "Jingdiao Cup" National University Graduation Design Competition, Chenlu won the individual bronze medal (ranked 10-30 nationwide).
-
2025.May 17 : A paper on robotic gripper is accepted by Soft Robotics (Soft Robotics ). Congratulations to Haotian, Wuhao, Yanzhe.
-
2025.April 15 : My student Hao Wu recieved an offer from University of Pennsylvania. 恭喜我的学生Hao Wu 收到了美国宾夕法尼亚大学的Offer。
-
2025.Feb 15 : My student Zhaohui and Weijie recieved intern offers from Shanghai AI Lab. 恭喜我的学生Zhaohui 和Weijie收到了上海AI Lab 实习Offer。
-
2025.Jan 2 : A paper on robotic packaging is accepted by IEEE Robotics and Automation Letters (IEEE RA-L ). Congratulations to Baoying, Zhaohui, Weijie.
-
2024.Dec 23 : After almost three-year period, one of our work on robotic grasping is accepted by IEEE Transactions on Automation Science and Engineering (IEEE T-ASE). Congratulations to Jiadong.
-
2024.June 30 : A paper on robotic kitting is accepted by IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024). Congratulations to Jiadong.
-
2024.June 30 : A paper on robotic modeling is accepted by IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024). Congratulations to Keqi, Haotian.
-
2024.June 30 : A paper on robotic gripper is accepted by IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024). Congratulations to Jihao, Haotian.
-
2024.Jun 1 : In the 2024 "Jingdiao Cup" National University Graduation Design Competition, Hao Wu won the individual bronze medal (ranked 10-30 nationwide).
-
2024.May 14 : A paper is accepted by Robotics: Science and Systems (RSS 2024). Congratulations to Jihao and Keqi.
-
2024.May 10 : My students Yicheng and Yanwen recieved offers from Imperial College and UC Berkeley, respectively. 恭喜我的Yicheng 收到了英国帝国理工的Offer, Yanwen 收到了美国加州伯克利大学的Offer。
-
2023.Jun 1 : In the 2023 "Jingdiao Cup" National University Graduation Design Competition, Ziyi won the individual gold medal (the only one nationwide), Keqi won the individual silver medal (ranked 2-9 nationwide) and also the Best Popularity Award, and Zhaohui won the first prize in the Eastern Region. 2023年度“精雕杯”全国大学生本科毕业设计大赛中,Ziyi荣获个人金奖(全国唯一),Keqi荣获个人银奖(全国排名2-9)并且荣获最佳人气奖,Zhaohui荣获东区一等奖。
-
2023.April 10 : My students Jiachun and Yangfei recieved offers from Carnegie Mellon University (CMU) and University of Illinois Urbana-Champaign(UIUC), respectively. 恭喜我的学生Jiachun 收到了美国卡内基梅隆大学的Offer, Yangfei 收到了美国伊利诺伊香槟分校的Offer。
-
2023.Feb 15 : A paper on robotic perception for grasping is accepted by IEEE/ASME Transactions on Mechatronics (IEEE T-MECH). Congratulations to Jiadong.
-
2022.Dec 2 : A paper on robotic mechanism is accepted by Soft Robotics(Soft Robotics). Congratulations!
-
2022.Oct 20 : A paper on robotic gripper is accepted by IEEE Robotics and Automation Letters (IEEE RA-L ). Congratulations!
-
2022.Step 30 : A paper on robotic gripper is accepted by IEEE/ASME Transactions on Mechatronics (IEEE T-MECH). Congratulations to Yue Feng.
-
2022.Jun 15 : I have opened multiple fully-funded PostDoc, research associate (master's degree) and research officer (Bachelor's degree) positions in robotic perception and grasp. 欢迎具有机械电子、计算机、数学,控制、电子、力学、材料、生物、物理,化学等背景的博士后,博士,硕士、做毕业设计的本科生,计划出国读书的本科生等加入机器人感知与抓取实验室, 感兴趣的同学请发邮件。
-
2022.Jun : After a 9-year wonderful and unforgettable time in Singapore and United States, I joined Zhejiang University ME to start my academic faculty journey.
Key Activities
- Associate Editor(AE), IEEE Transactions on Automation Science and Engineering (T-ASE) (2024 - 2026)
- Associate Editor(AE), IEEE Robotics and Automation Letters (RA-L) (2022 - 2027)
- Associate Editor(AE), IEEE International Conference on Robotics and Automation (ICRA 2023/2024/2025/2026)
- Associate Editor(AE), IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2022/2023/2024/2025/2026)
- Associate Editor(AE), IEEE/ASME International Conference on Advanced Intelligent Mechatronics(AIM 2022/2023/2024/2025)
- Member of T-Mech Junior Reviewers Program (TJRP), IEEE/ASME Transactions on Mechatronics(T-Mech 2021-2023)
Publications
Journal papers
In-Hand Manipulation track
Xidan Zhang, Zhaohui Lin, H. Dong.
Picking in Clutter track
Wei Yu, Xidanzhang, Zhian Su, H. Dong.
Simulation-Sorting Manipulation track
Zhian Su, Weijie Kong, H. Dong.
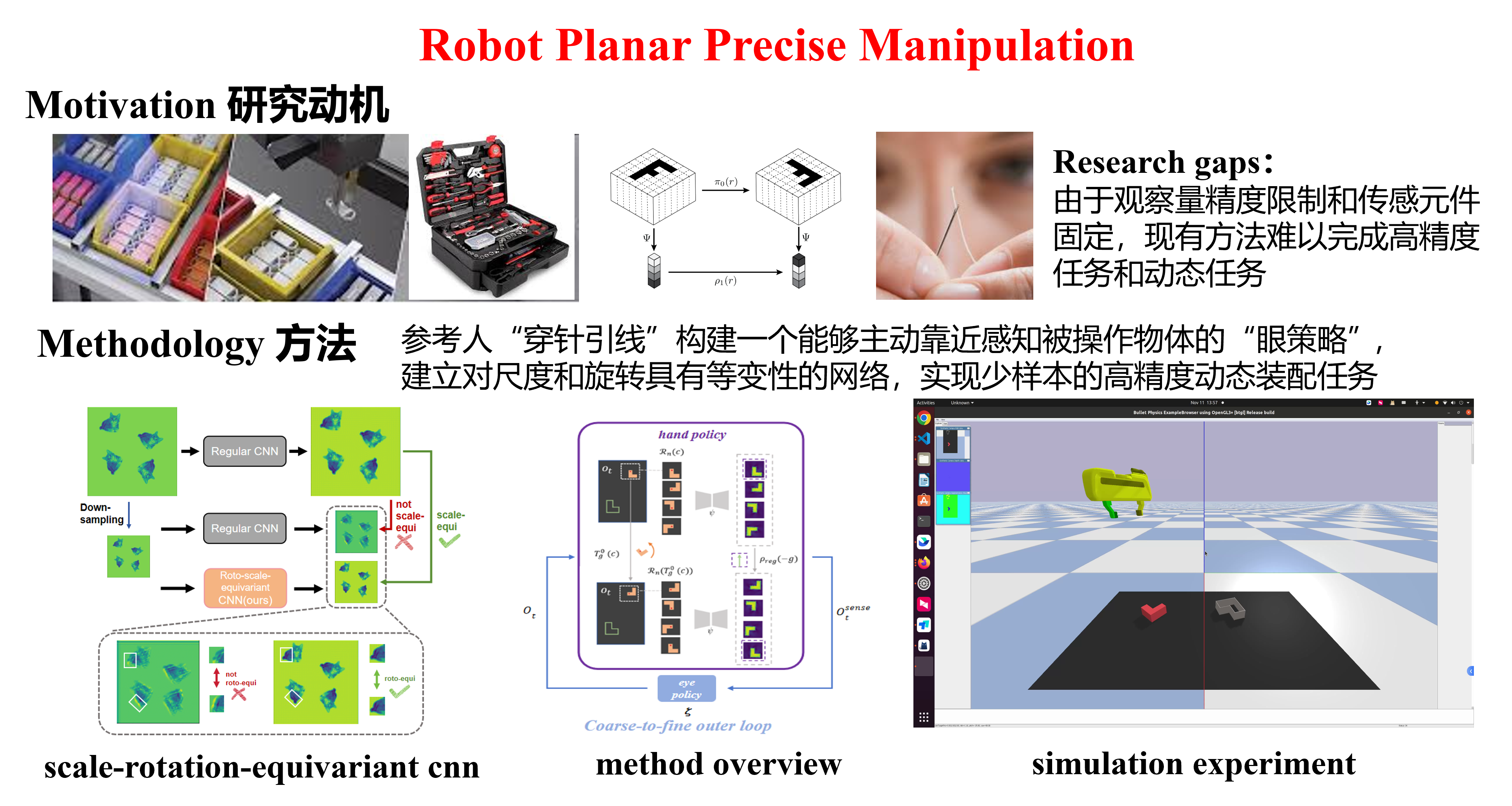
Robotic high-precision assembling
Wei Yu,..., H. Dong.
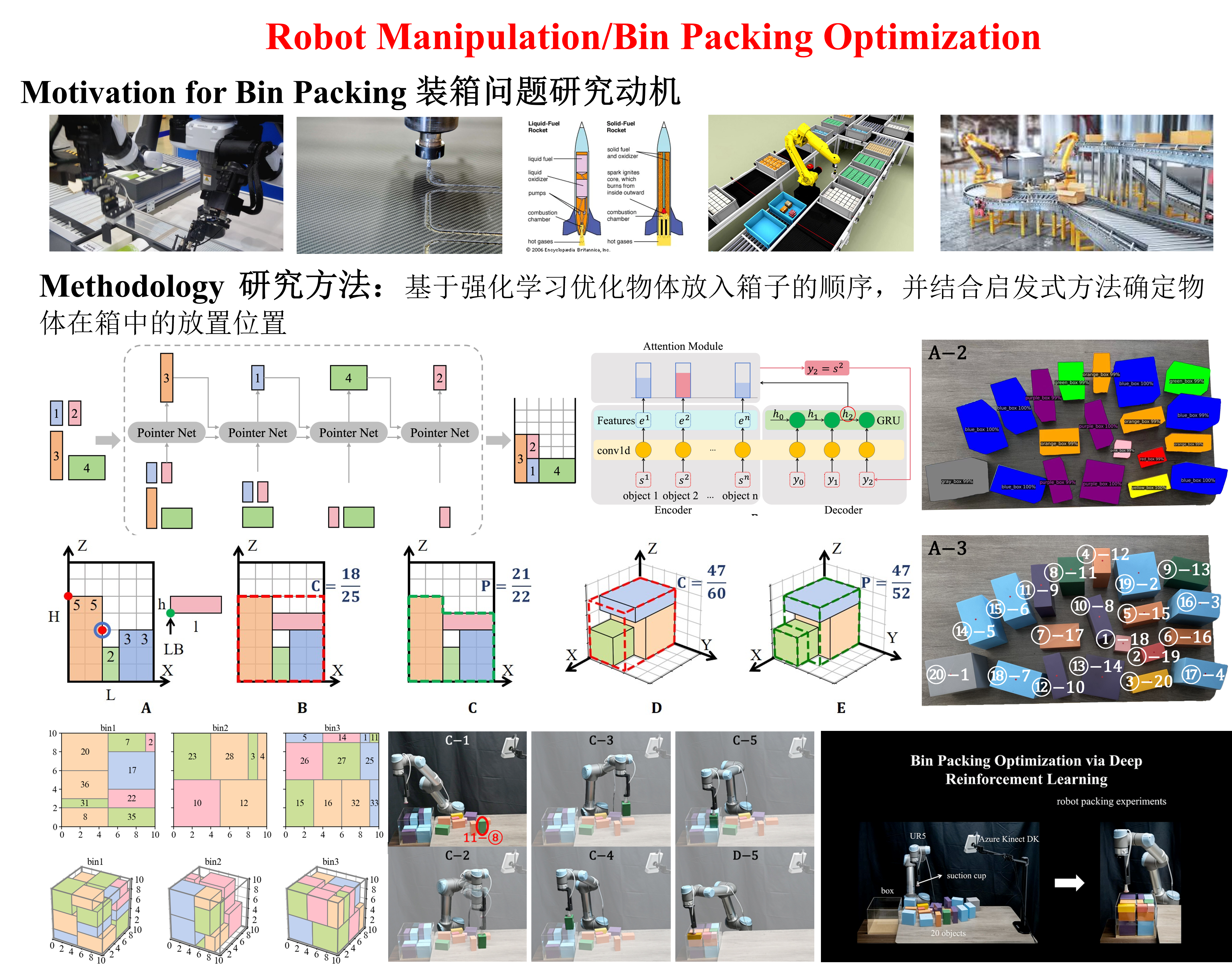
Bin Packing Optimization via Deep Reinforcement Learning
B. Wang, H. Dong.
IEEE Robotics and Automation Letters(RA-L), 2025.

Dexterous manipulation via a two-finger gripper in the constrained space
Yanzhe Wang, H. Dong.
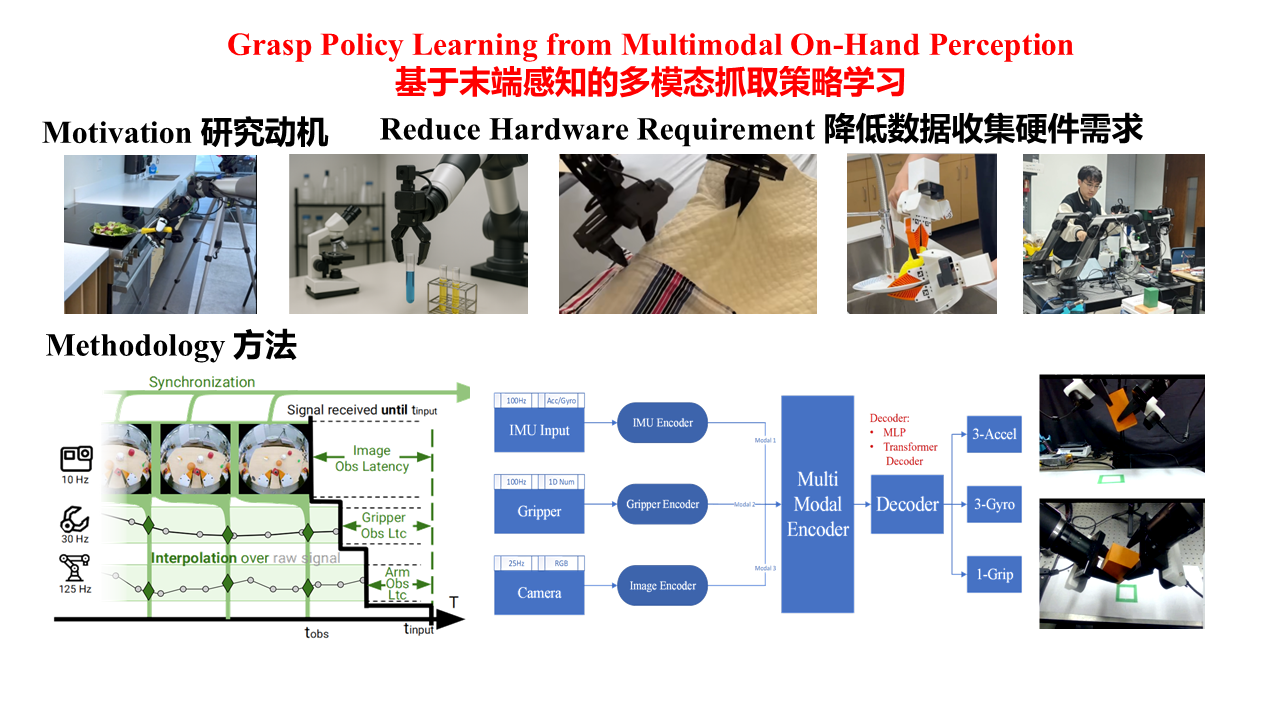
Grasp Policy Learning from Multimodal On-Hand Perception
Haonan Dong, H. Dong.
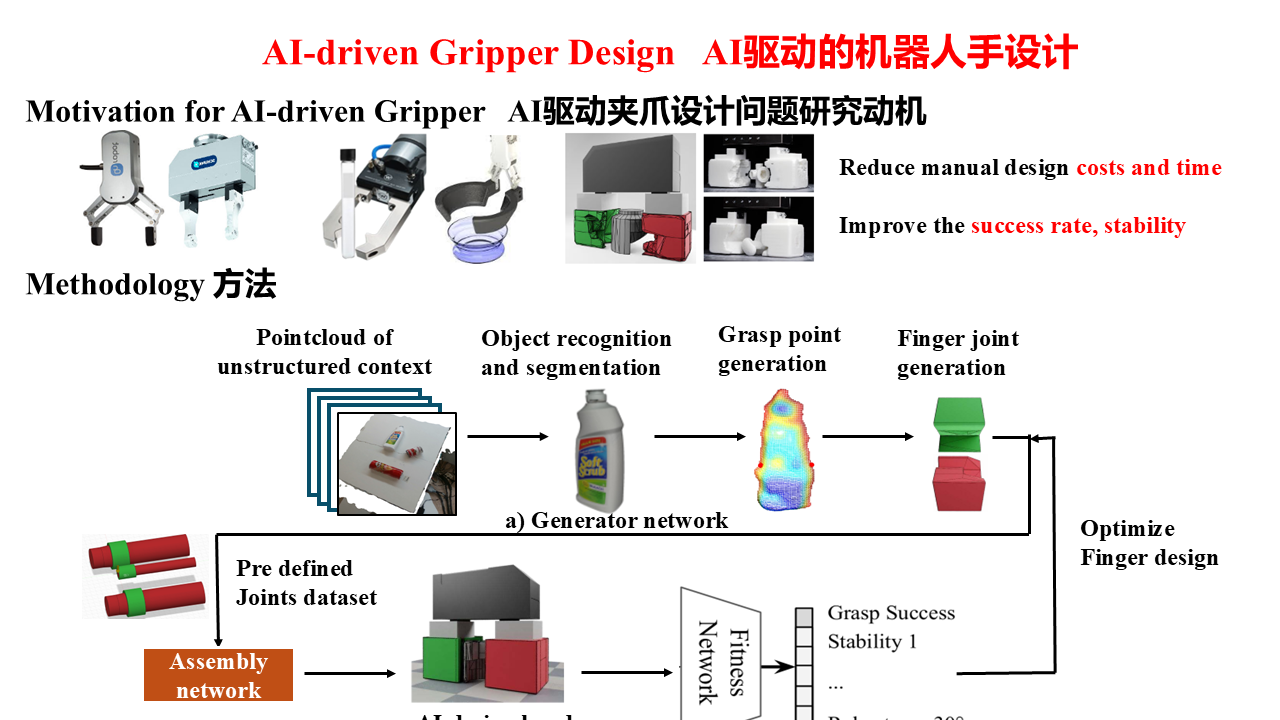
AI-driven Gripper Design
Haoran Huang, H. Dong.

Robot Manipulation via affordance and pose
Weijie Kong, H. Dong.

Robot visual seal coating
Zhaohui Lin, H. Dong.
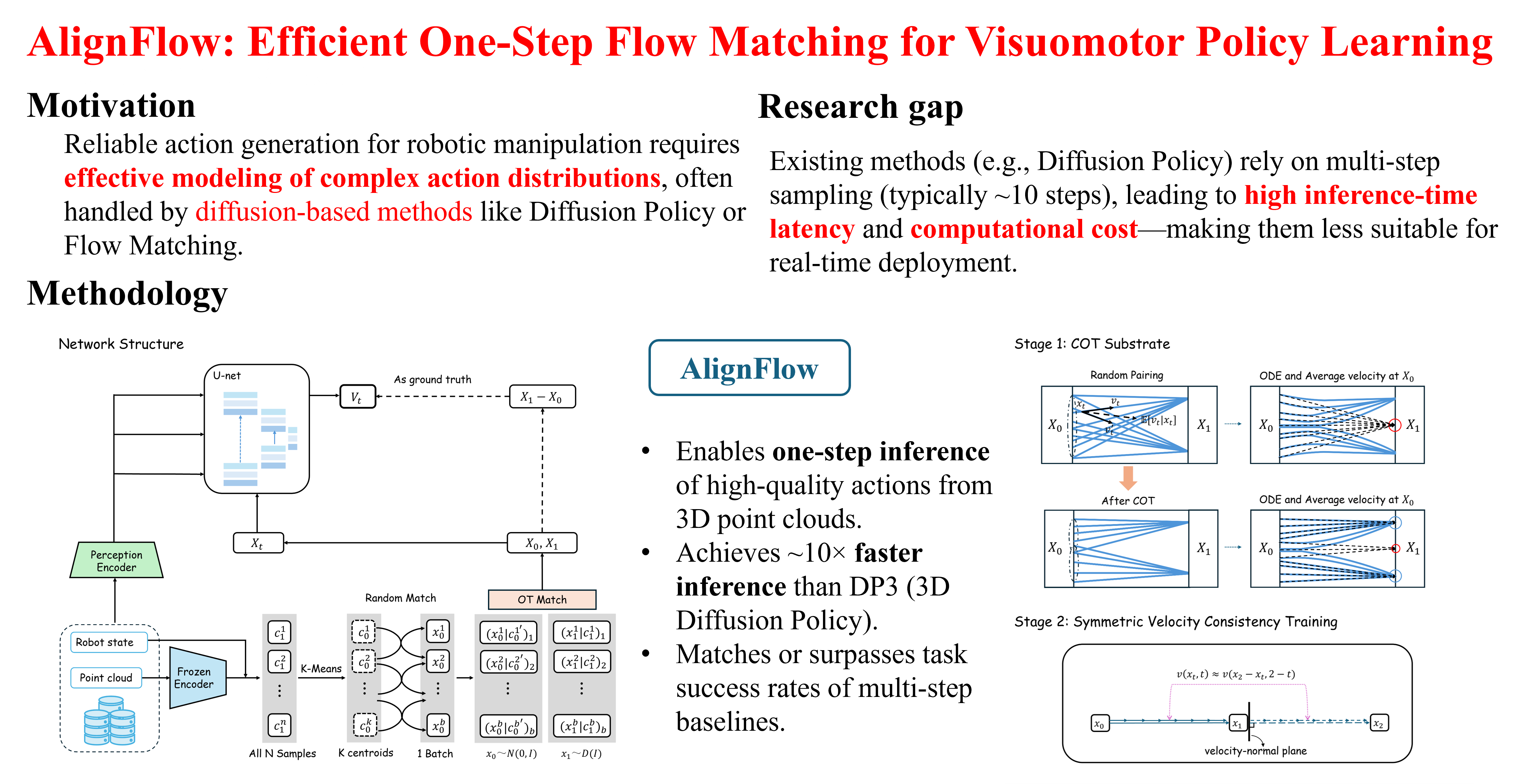
Efficient one-step flow matching for visuomotor policy learning
Yicheng Ma, H. Dong.
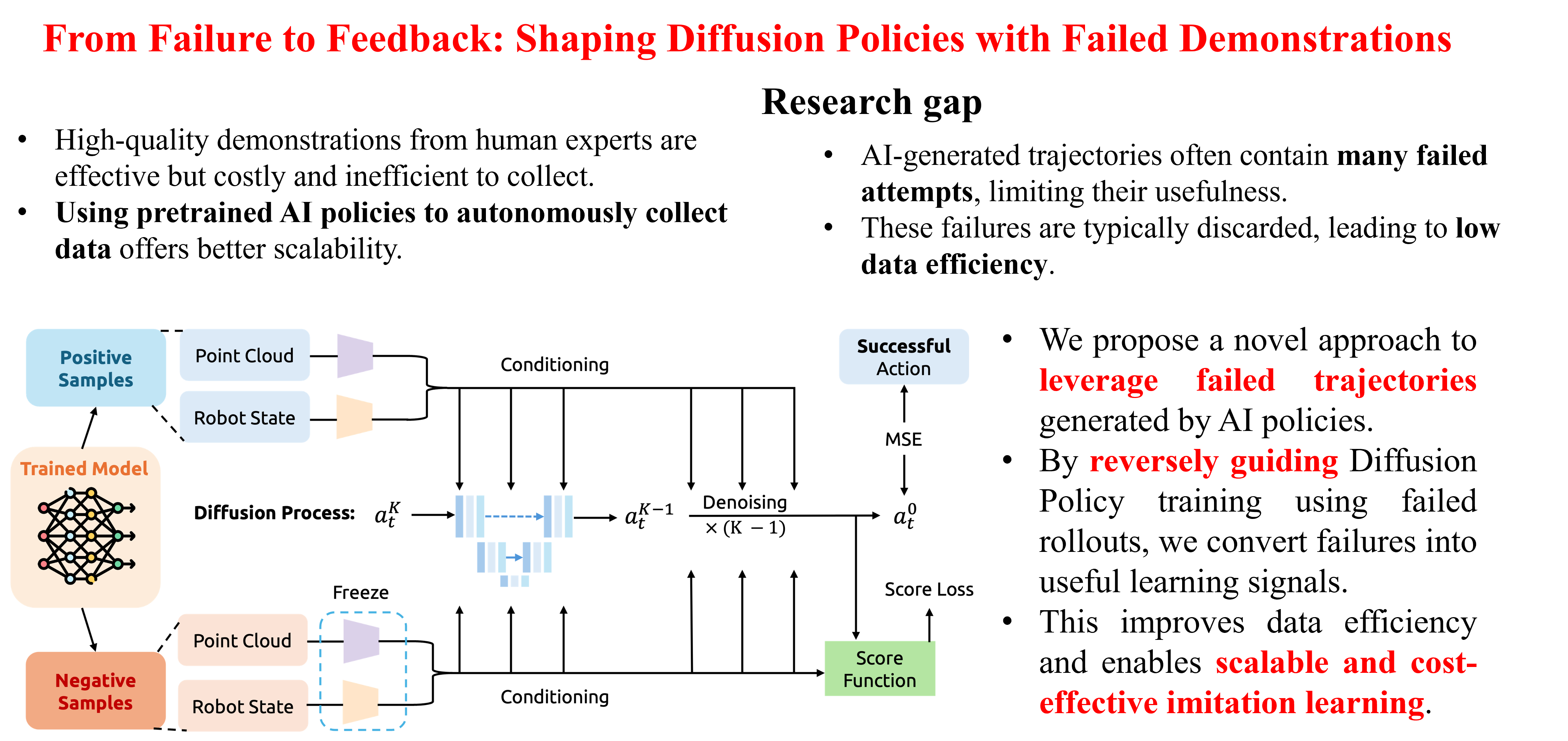
Shape diffusion policies with failed demonstration
Yicheng Ma, H. Dong.
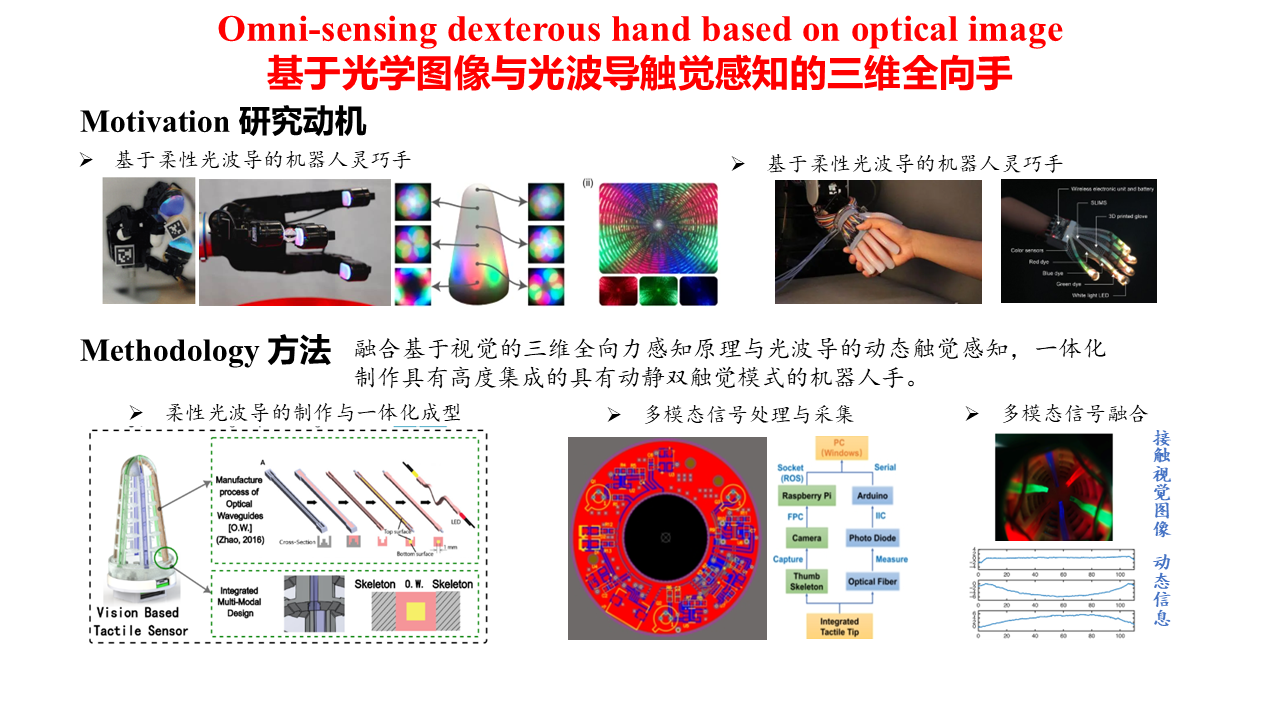
Omni-sensing dexterous hand based on optical image
Haotian Guo,Hao Wu, H. Dong.
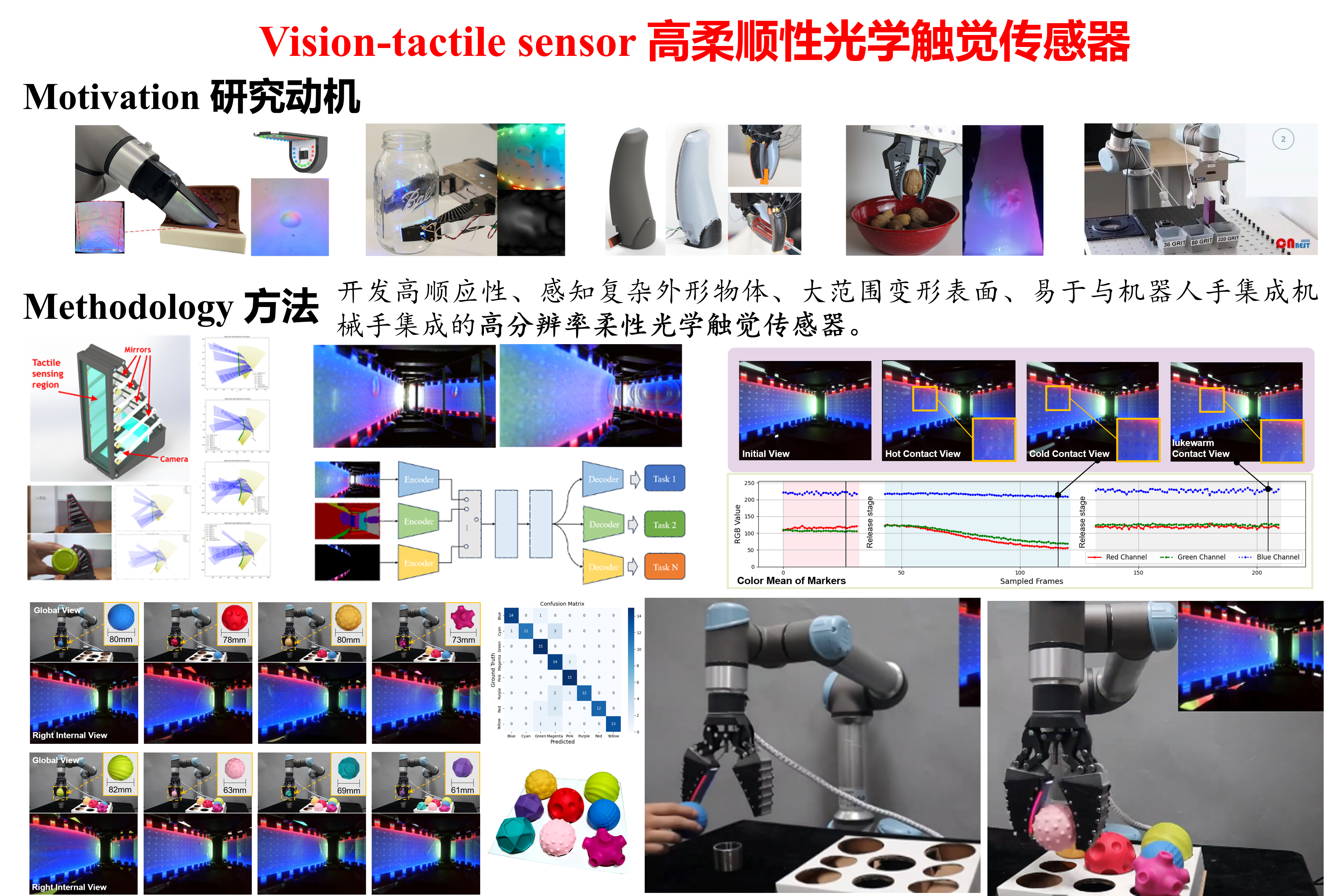
Vision-tactile sensor
Yanzhe Wang,Hao Wu,Haotian Guo, H. Dong.
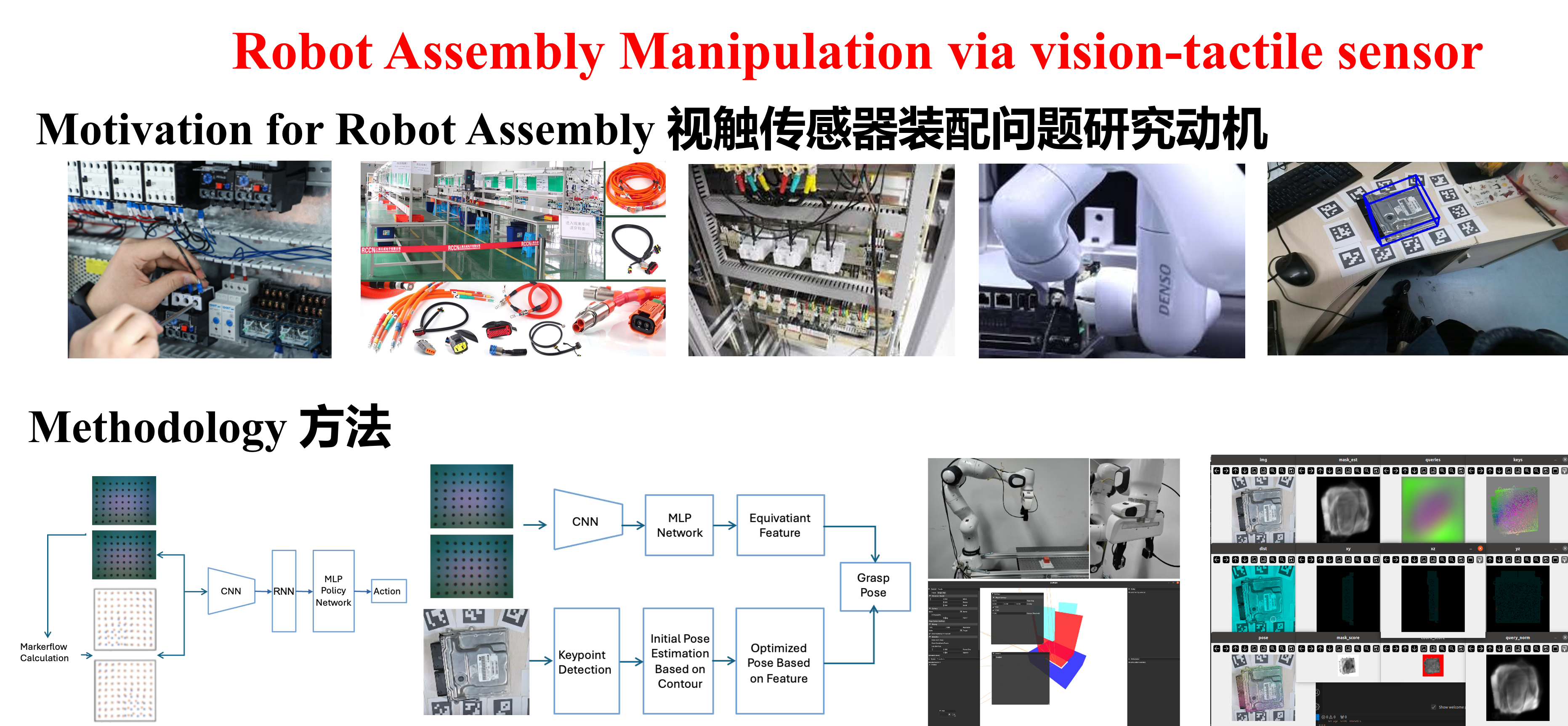
Robotic assembling manipulation via visual-tactile sensor
Meixuan Ren, H. Dong.

Robotic hand 1
Wuhao, H. Dong.

Robotic hand 2
Xin Ke, H. Dong.

Robotic hand 3
Jihao Li, H. Dong.

Variable-stiffness fin-ray gripper integrated with SMP
Haotian Guo, H. Dong.
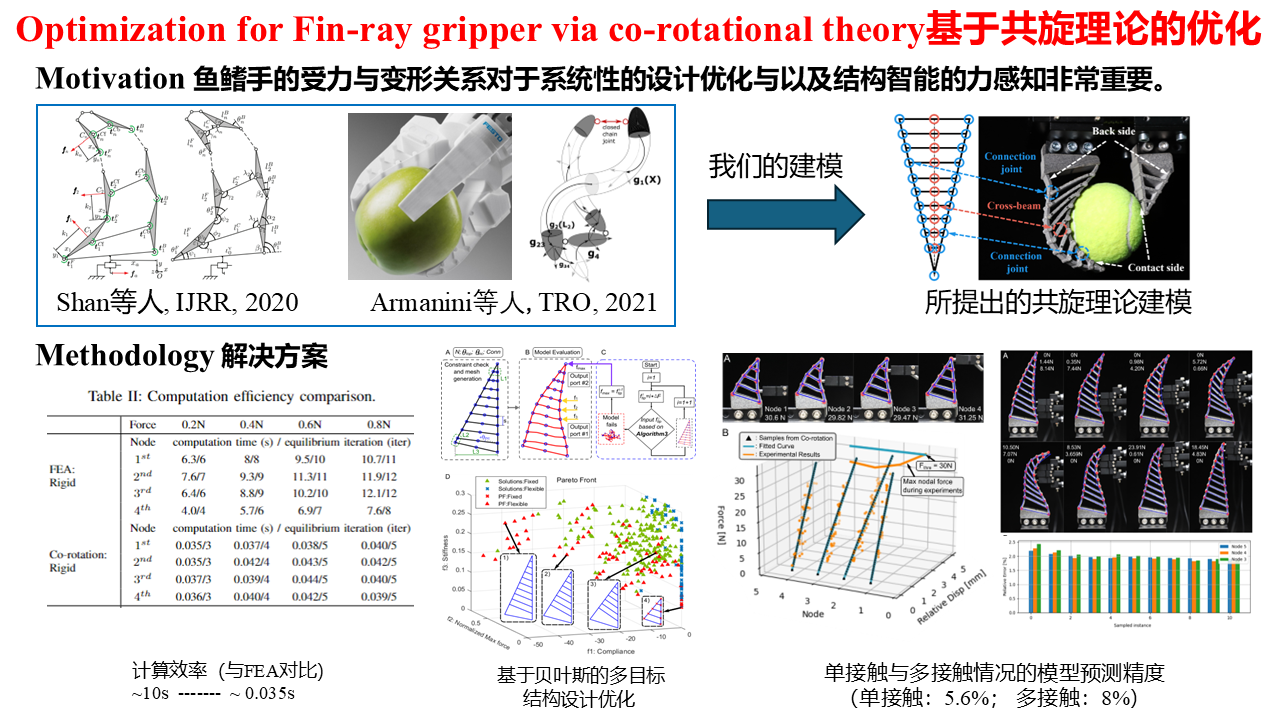
Optimization for Fin-ray gripper via co-rotational theory
Haotian Guo,Ziyi Zheng, H. Dong.

Construction of Bin-picking System for Logistic Application: A Hybrid Robotic Gripper and Vision-based Grasp Planning
Zhian Su, H. Dong.

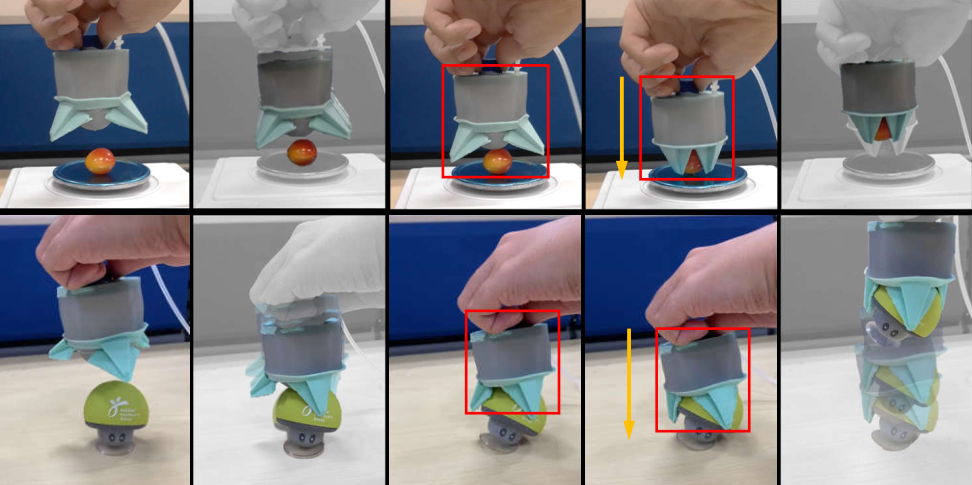
Robotic Harvesting of Delicate Fruit: Design and Implementation of an Under-actuated Disturbance-Resistant Gripper
Jianguo Wang,Jihao Li, H. Dong.
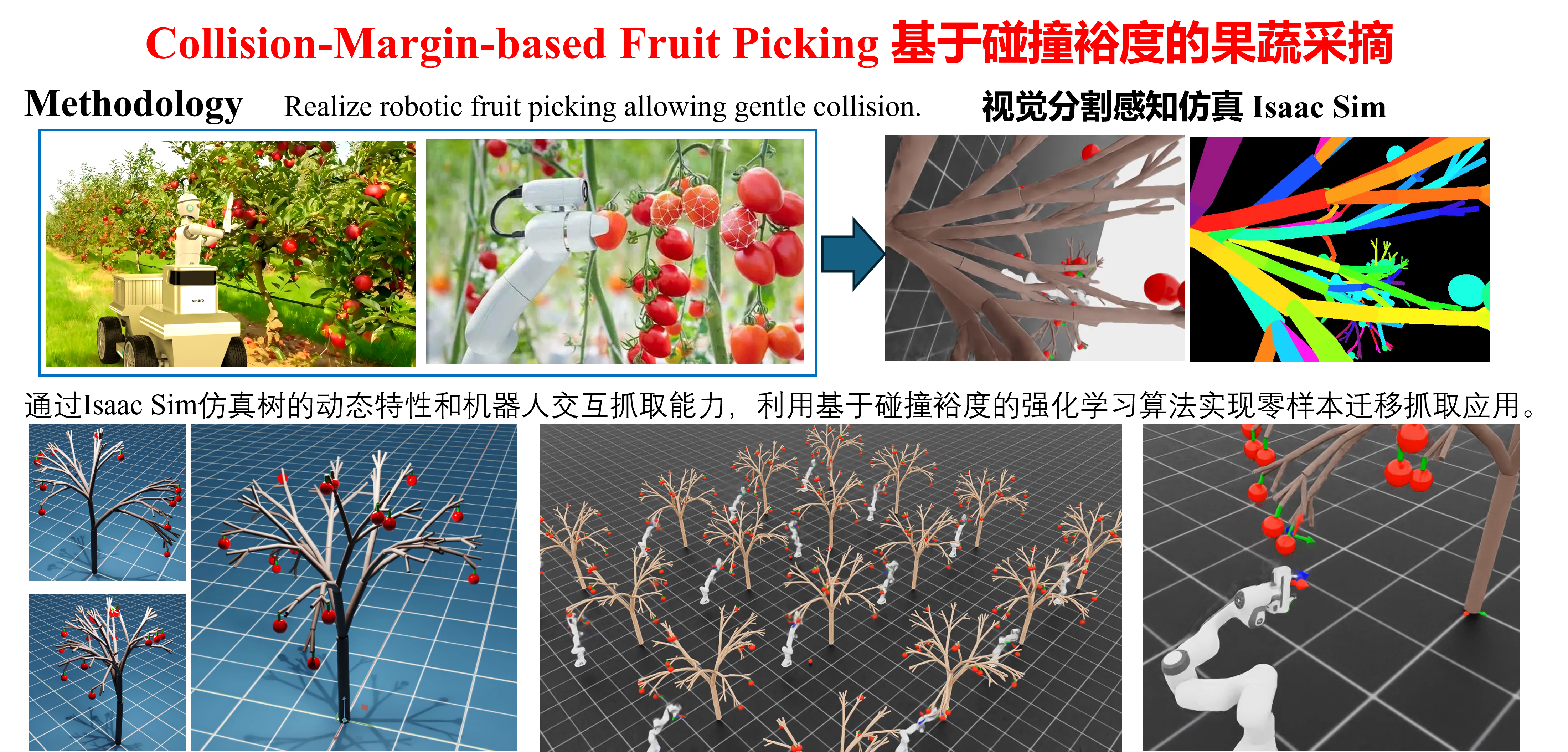
Collision-Margin-based fruit picking
Zhaohui Lin, H. Dong.

Amphibious robot gripper
Keqi Zhu, H. Dong.

The robot gripper for picking up books
Ziyi Zheng, H. Dong.
An In-hand Gripper with Mecanum Wheel: Design, Modeling and Characterization
Ziyi Zheng, Keqi Zhu, H. Dong.
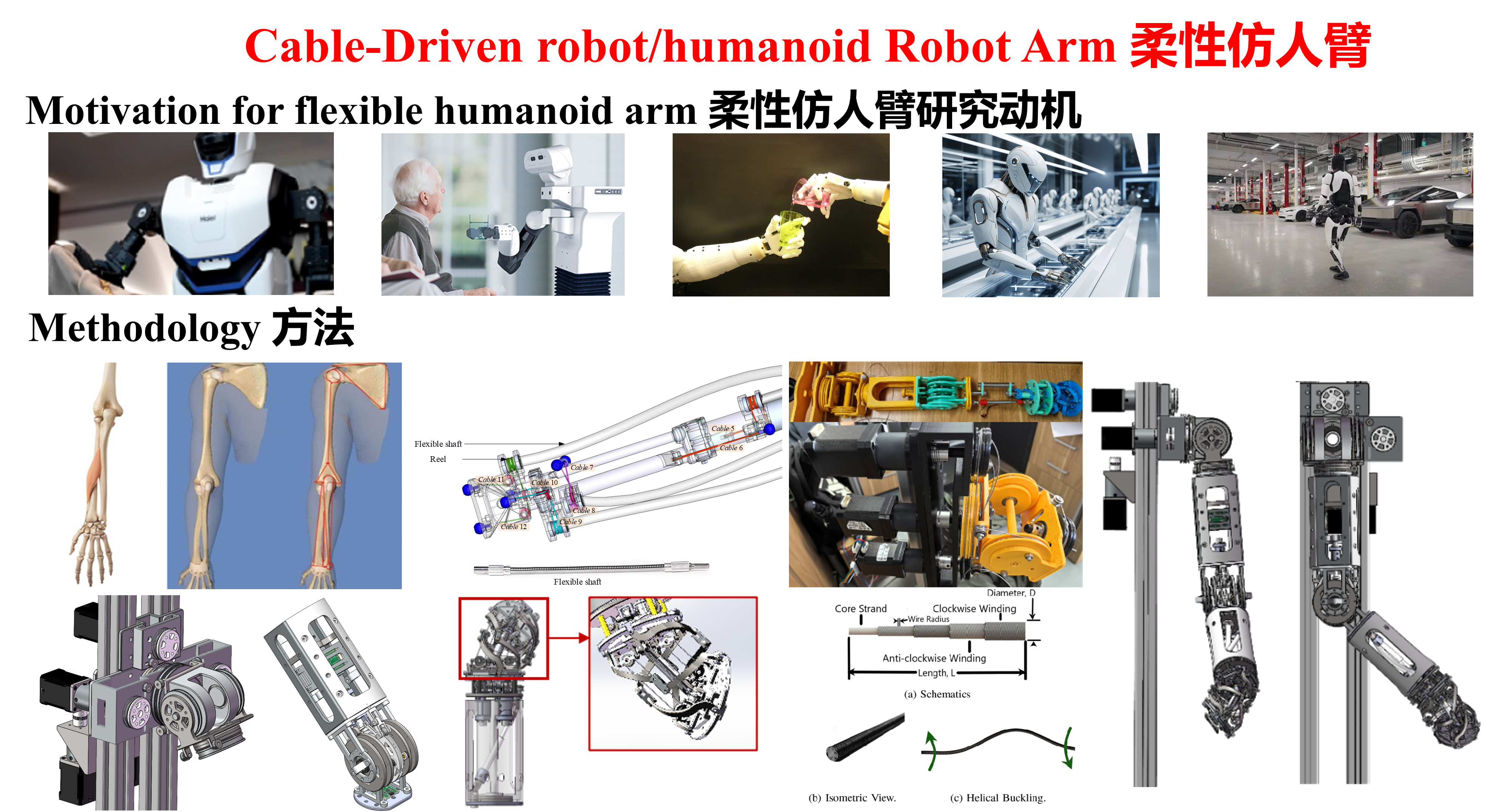
Flexible humanoid arm
Jianguo Wang, H. Dong.
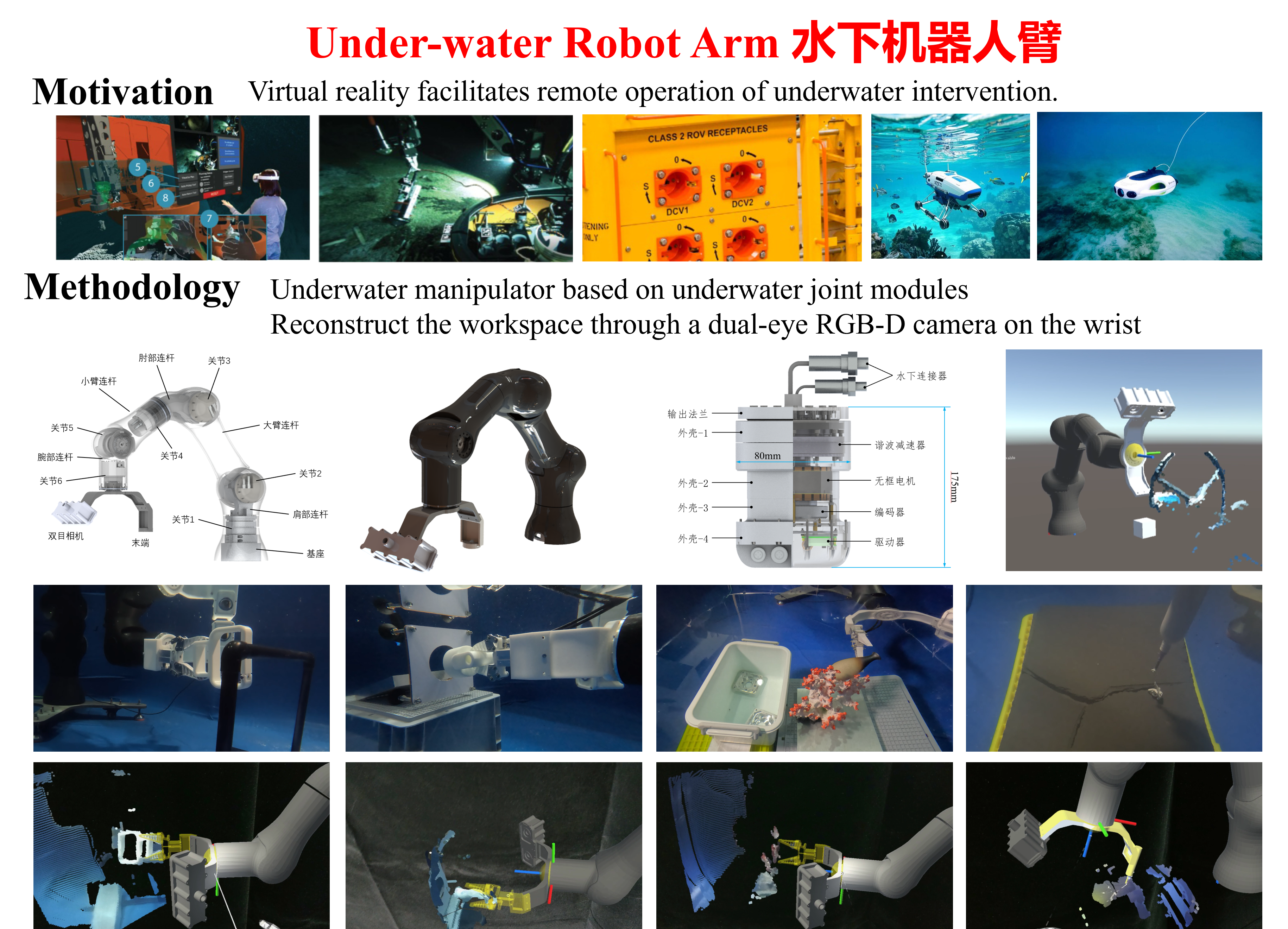
The robot arm for under water applications
Junhan Zhang, H. Dong.
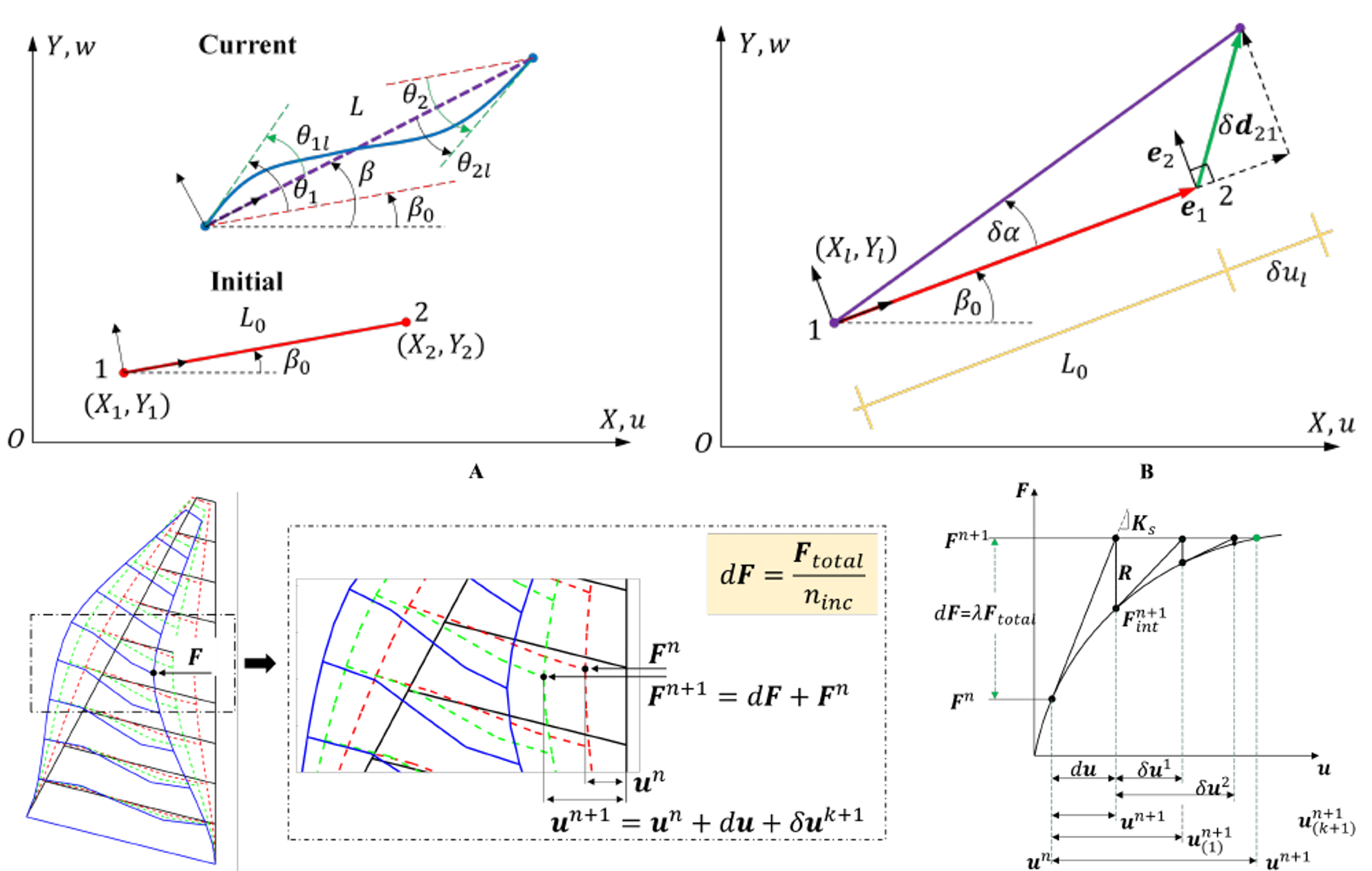
Theoretical Model Construction of Deformation-Force for Soft Grippers Part I: Co-rotational Modeling and Force Control for Design Optimization
H Dong, H Guo, S Yang, C Qiu, J Dai, I Chen.
arXiv preprint arXiv:2303.12987(arXiv), 2024.
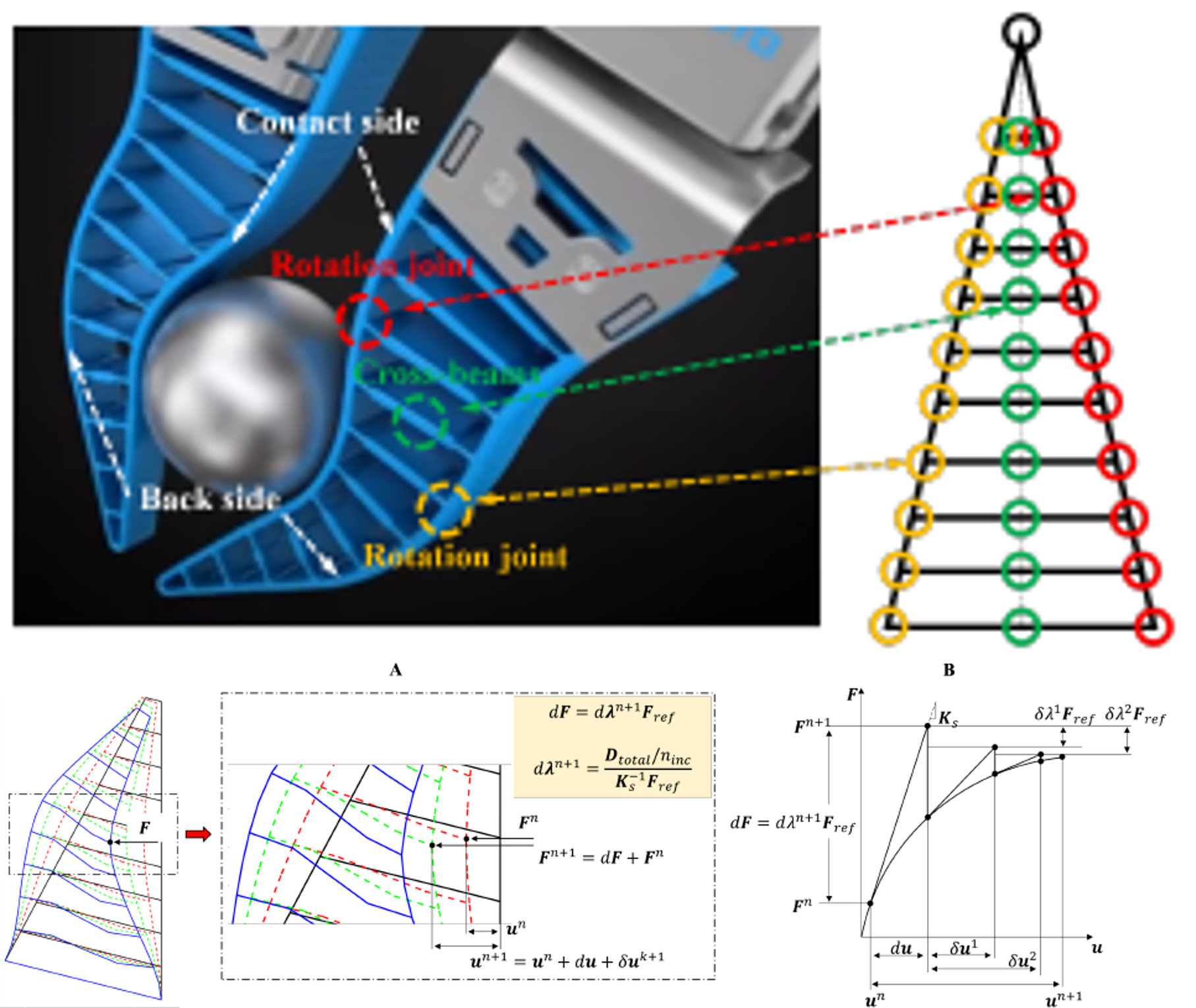
Theoretical Model Construction of Deformation-Force for Soft Grippers Part II: Displacement Control Based Intrinsic Force Sensing
H Dong, Z Zheng, H Guo, S Yang, C Qiu, J Dai, I Chen
arXiv preprint arXiv:2303.12418(arXiv), 2024.
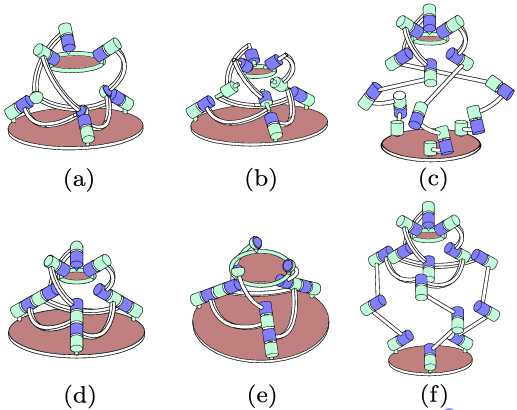
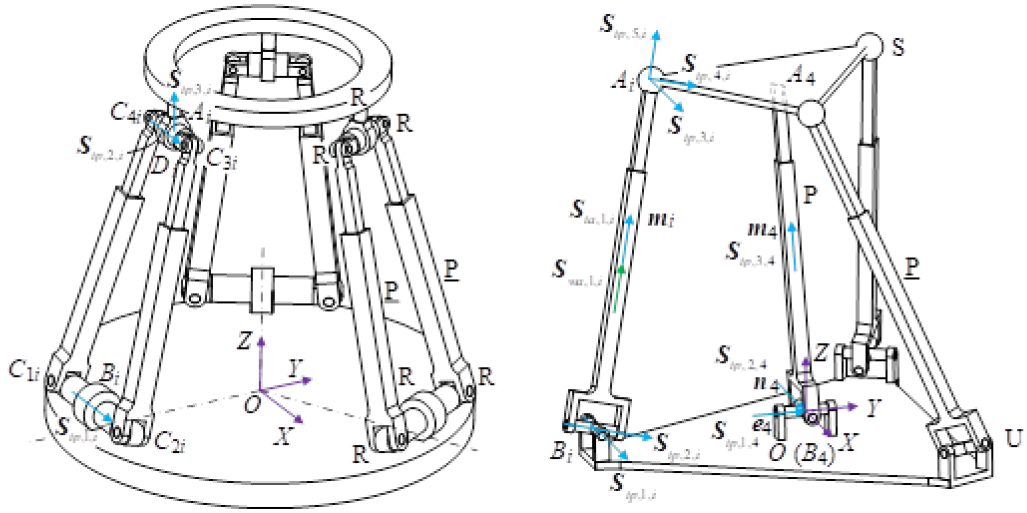
Unveiling the Complete Variant of Spherical Robots
H Nigatu, L Jihao, G Shi, G Lu, H Dong
arXiv preprint arXiv:2403.03505(arXiv), 2024.
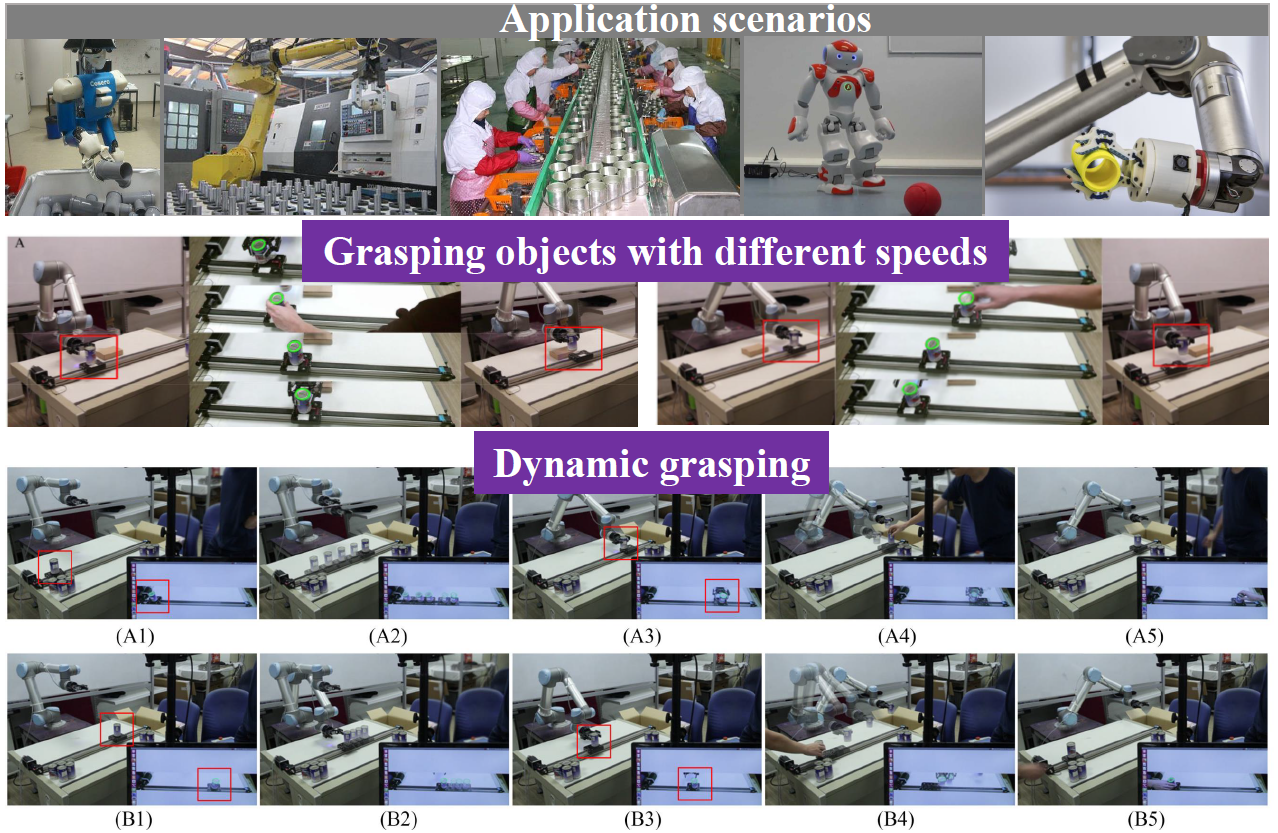
Real-time Robotic Manipulation of Cylindrical Objects in Dynamic Scenarios through Elliptic Shape Primitives
H. Dong, E. Asadi, G. Sun, D. K. Prasad, IM. Chen.
IEEE Transactions on Robotics(T-RO Long paper), 2018.
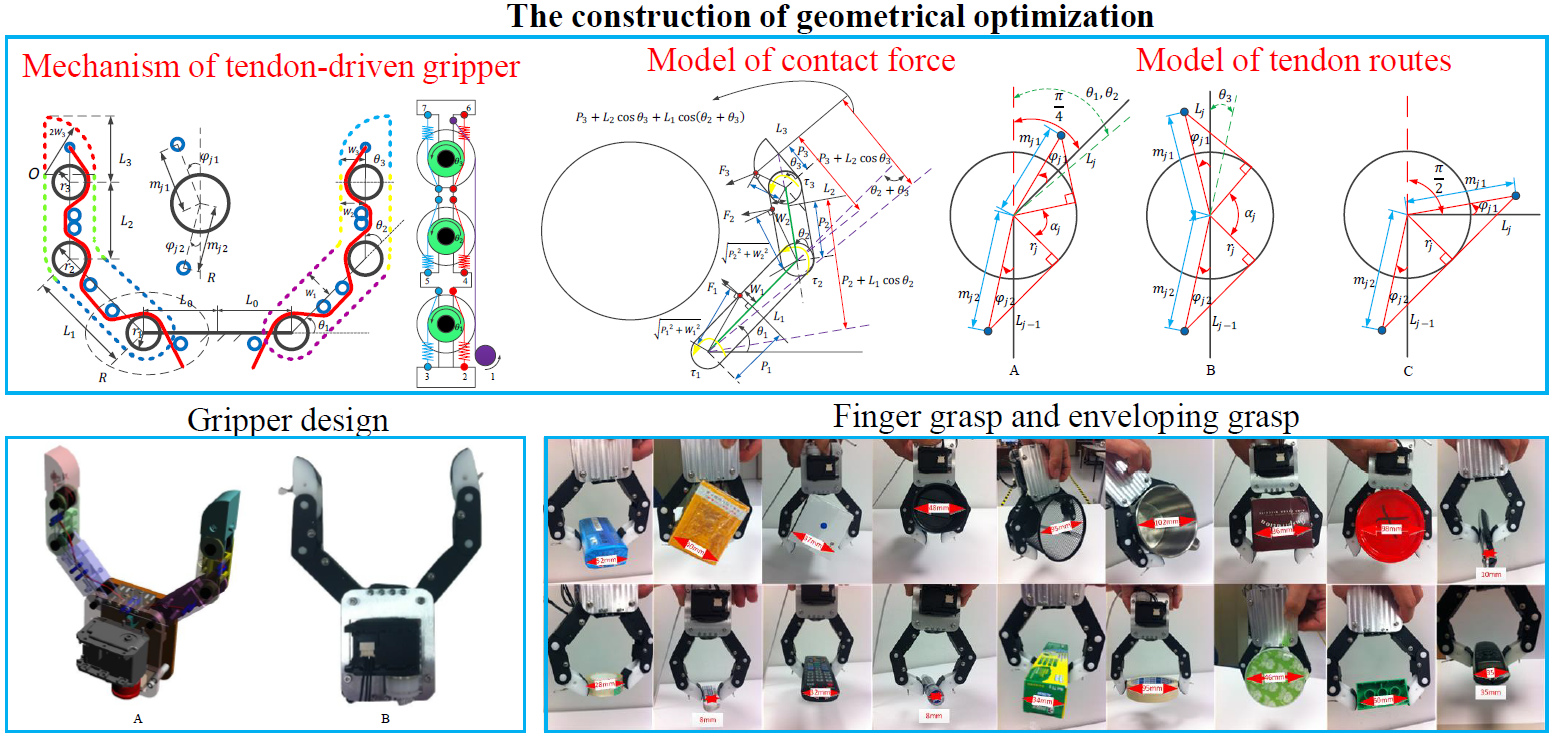
Geometric design optimization of an under-actuated tendon-driven robotic gripper
H. Dong, E. Asadi, C. Qiu, J. Dai, and IM. Chen.
Robotics and Computer-Integrated Manufacturing(RCIM), 2017.
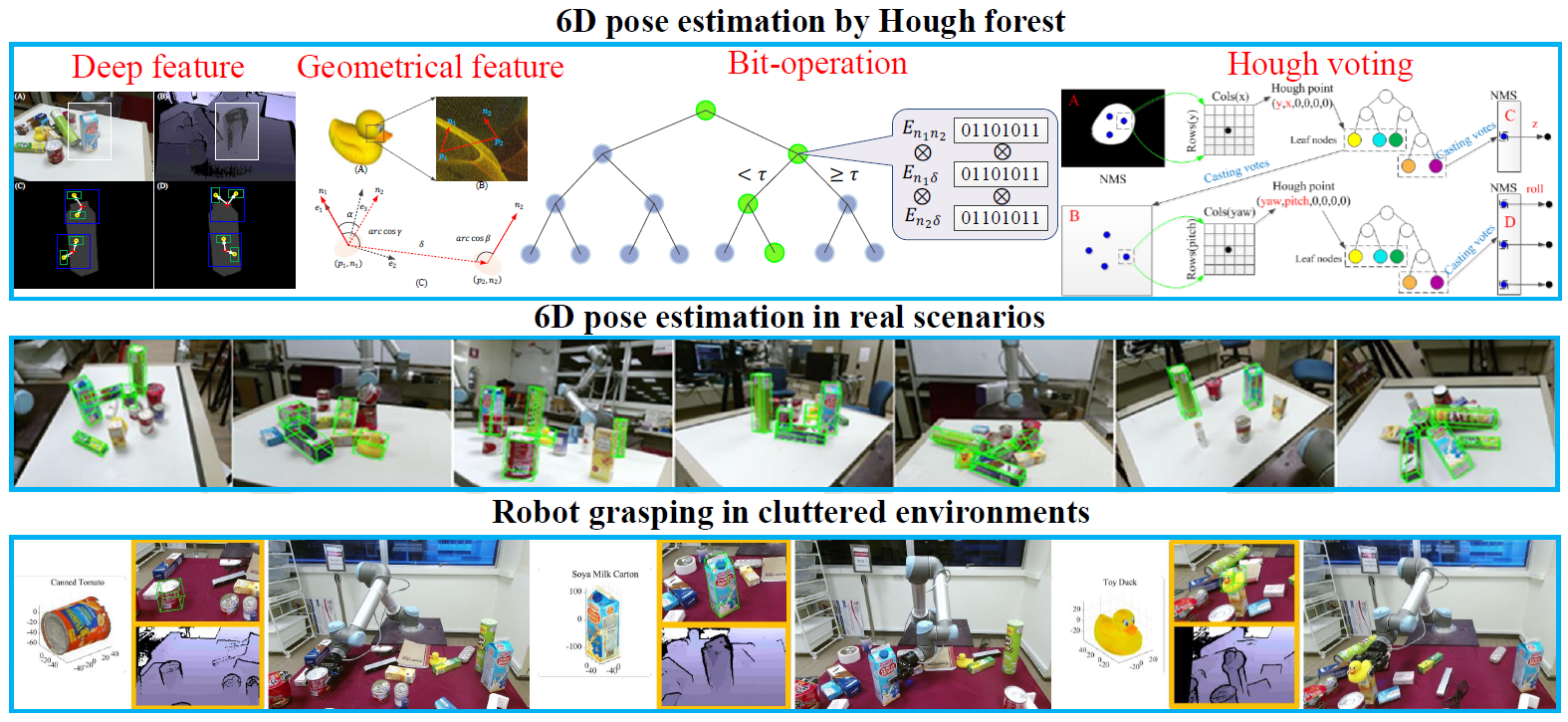
Enabling Robotic Grasp: Object Pose Estimation via Pruned Hough Forest with Combined Split Schemes
H. Dong, DK Prasad, IM. Chen.
IEEE Transactions on Automation Science and Engineering(T-ASE), 2020.

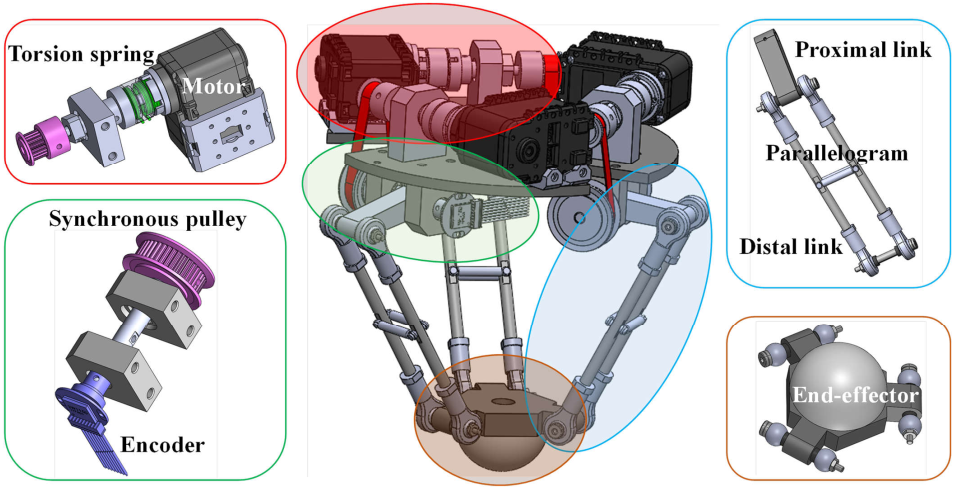
Construction of Interaction Parallel Manipulator: Towards Rehabilitation Massage
H. Dong, Y. Feng, Q. Chen, IM. Chen.
IEEE/ASME Transactions on Mechatronics(T-MECH), 2022.
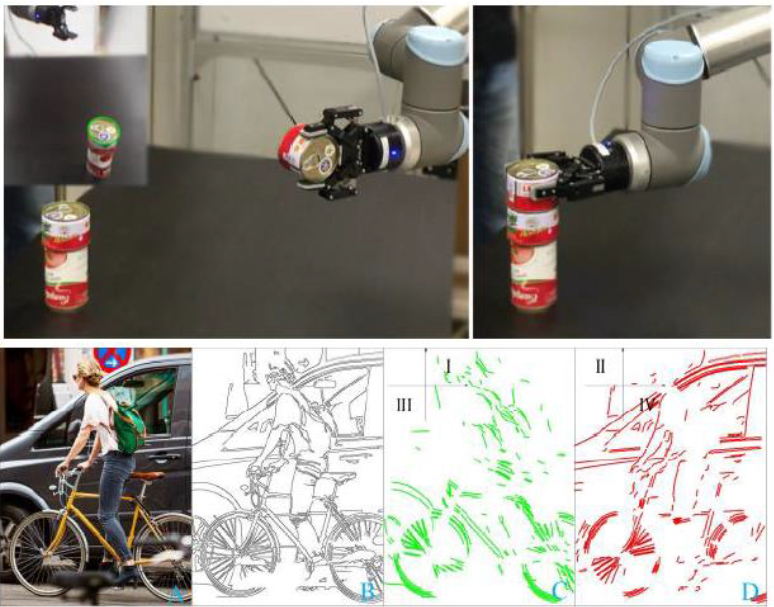
Fast Ellipse Detection for Robotic Manipulation of Cylindrical Objects
H. Dong, E. Asadi, C. Qiu, J. Dai, and IM. Chen.
IEEE Robotics and Automation Letters(RA-L), 2018.
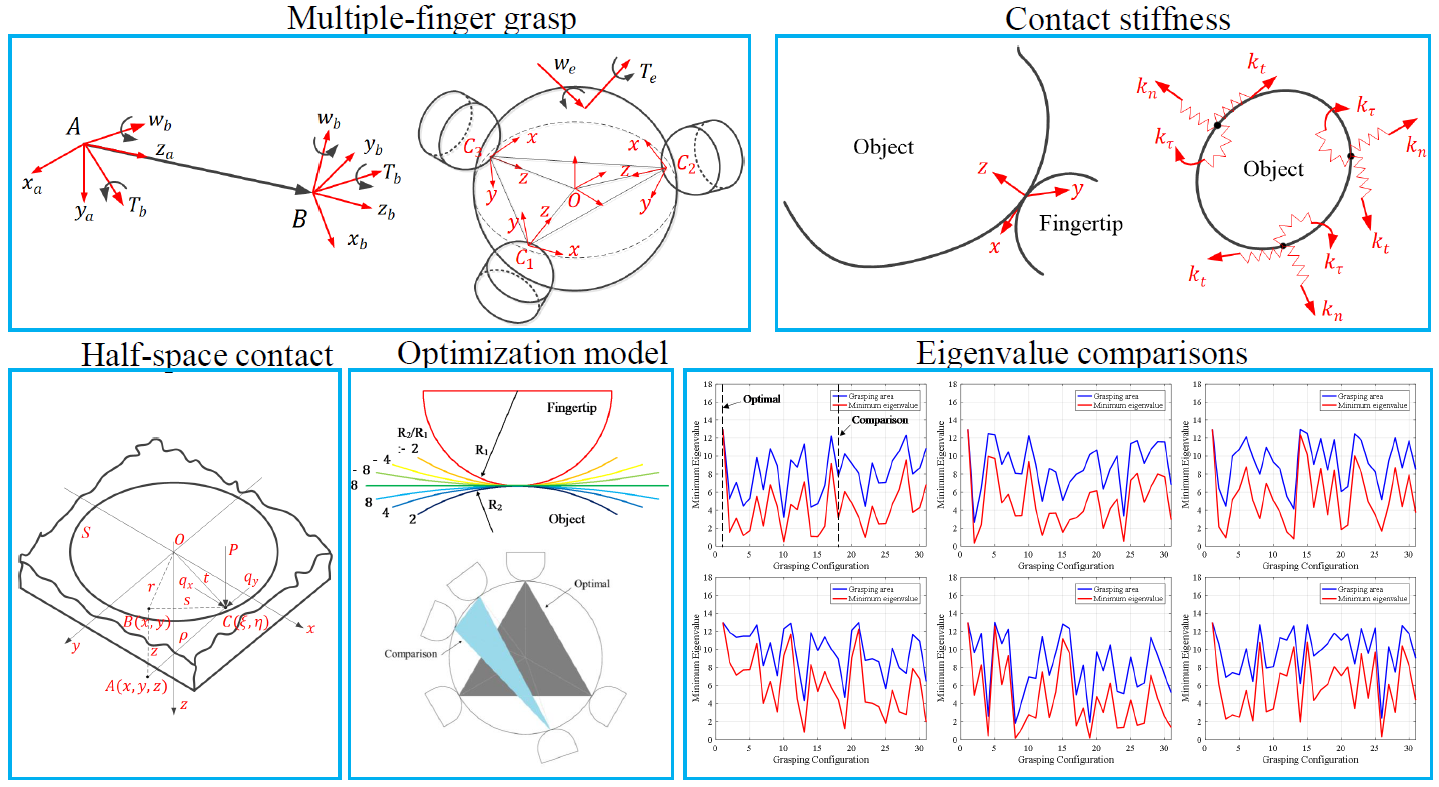
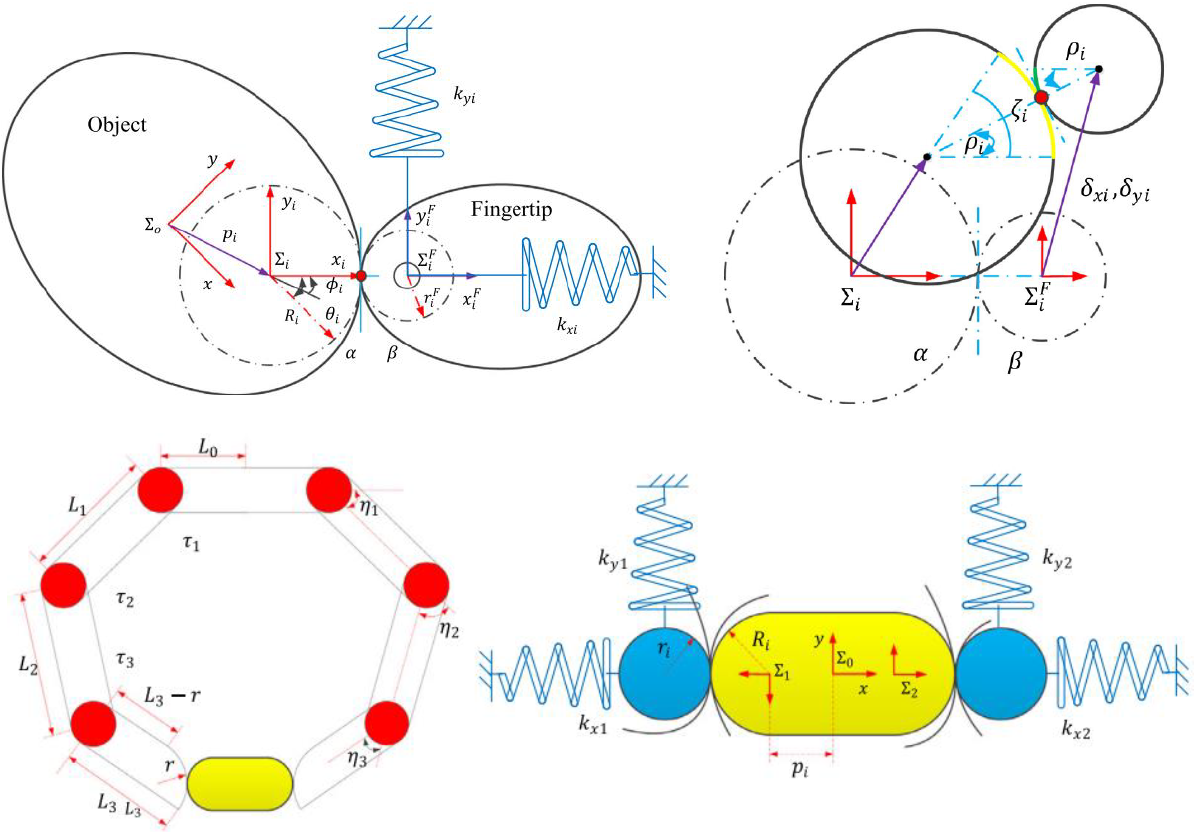
Enabling grasp action: Generalized quality evaluation of grasp stability via contact stiffness from contact mechanics insight
H. Dong, C Qiu, DK Prasad, Y Pan, J Dai, IM Chen.
Mechanism and Machine Theory(MMT), 2019.
Grasp analysis and optimal design of robotic fingertip for two tendon-driven fingers
H. Dong, E. Asadi, C. Qiu, J. Dai, and IM. Chen.
Mechanism and Machine Theory(MMT), 2018.
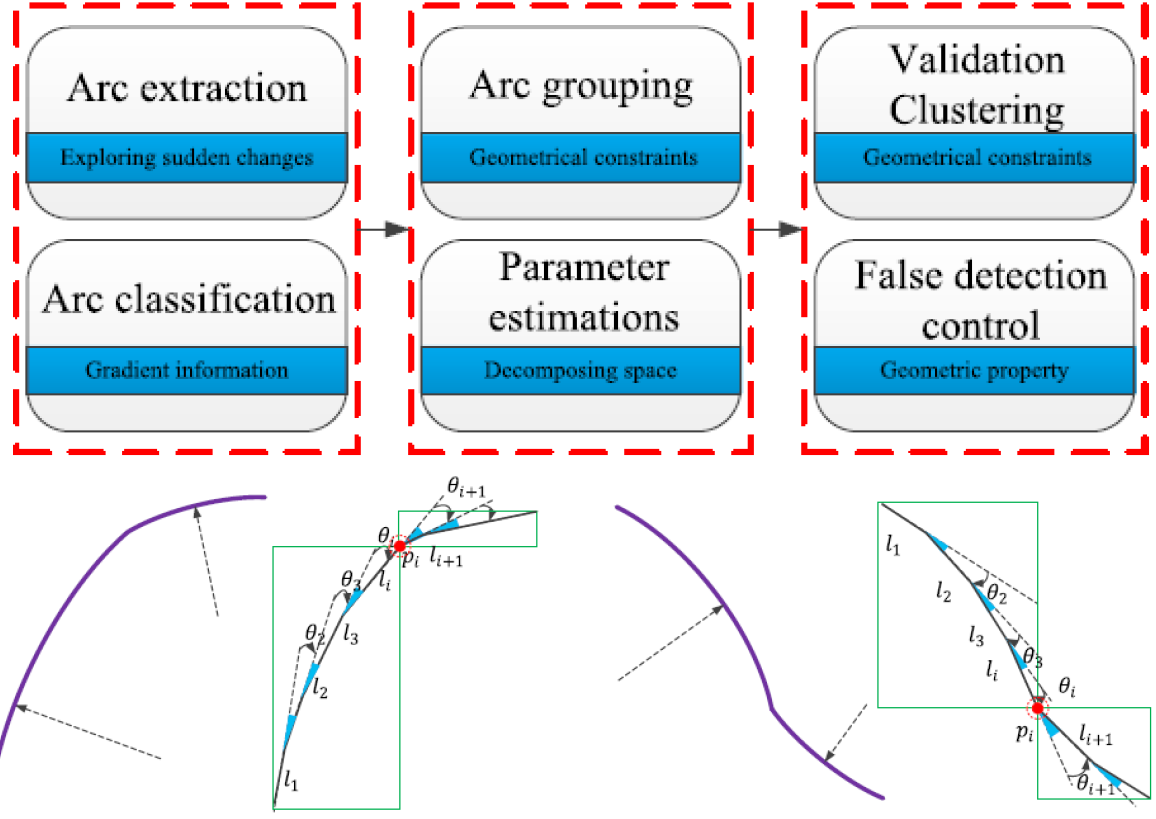
Accurate detection of ellipses with false detection control at video rates using a gradient analysis
H. Dong, D. K. Prasad, and IM Chen.
Pattern Recognition(PR), 2017.
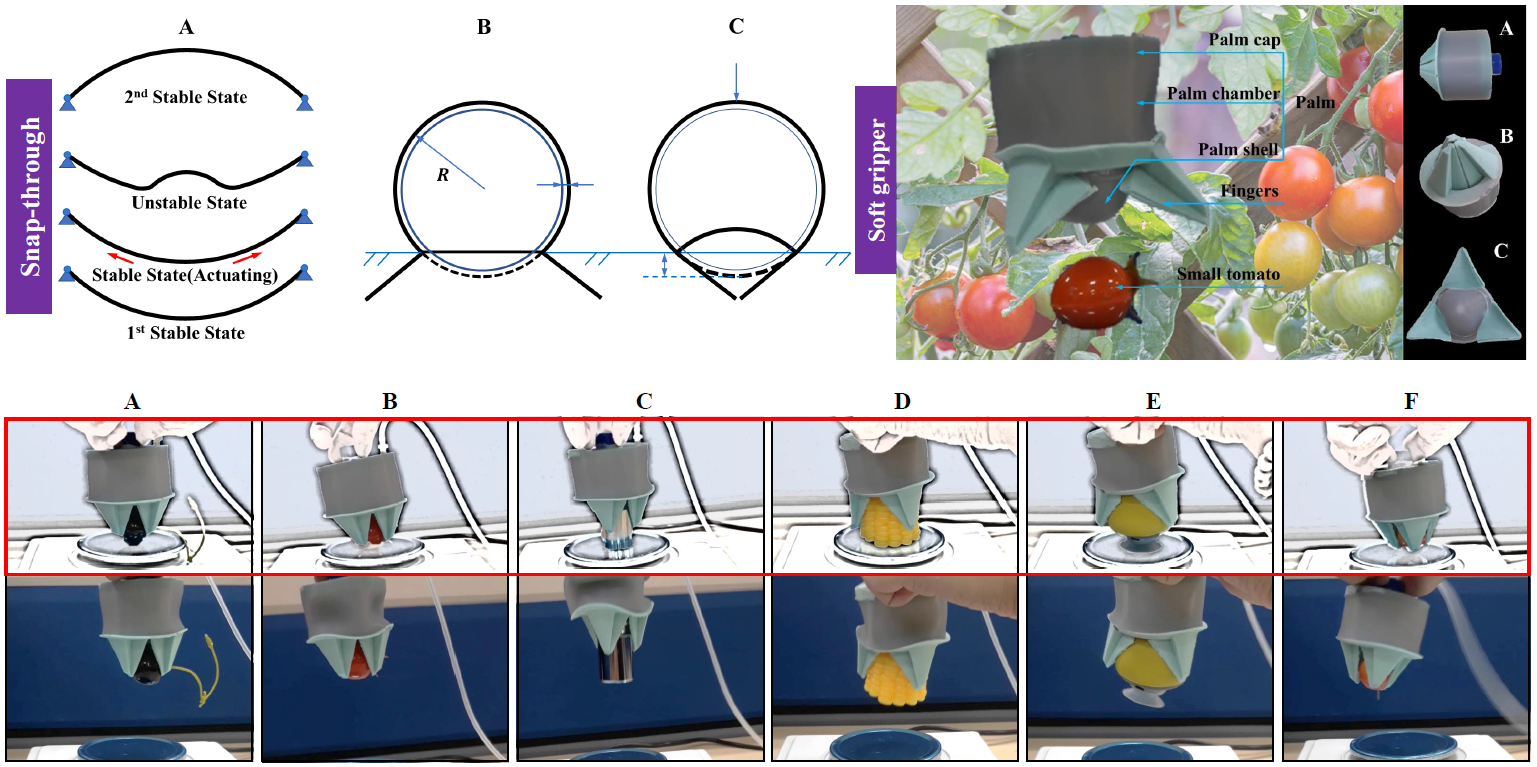
GSG: A Granary Soft Gripper with Mechanical Force Sensing via 3-Dimensional Snap-Through Structure
H. Dong, CY Chen, C Qiu, CH Yeow, H Yu.
IEEE Robotics and Automation Letters(RA-L), 2022.

Robotic Manipulations of Cylinders and Ellipsoids by Ellipse Detection with Domain Randomization
H. Dong, JD Zhou, C Qiu, P. K. Dilip, IM Chen.
IEEE/ASME Transactions on Mechatronics(T-MECH), 2022.
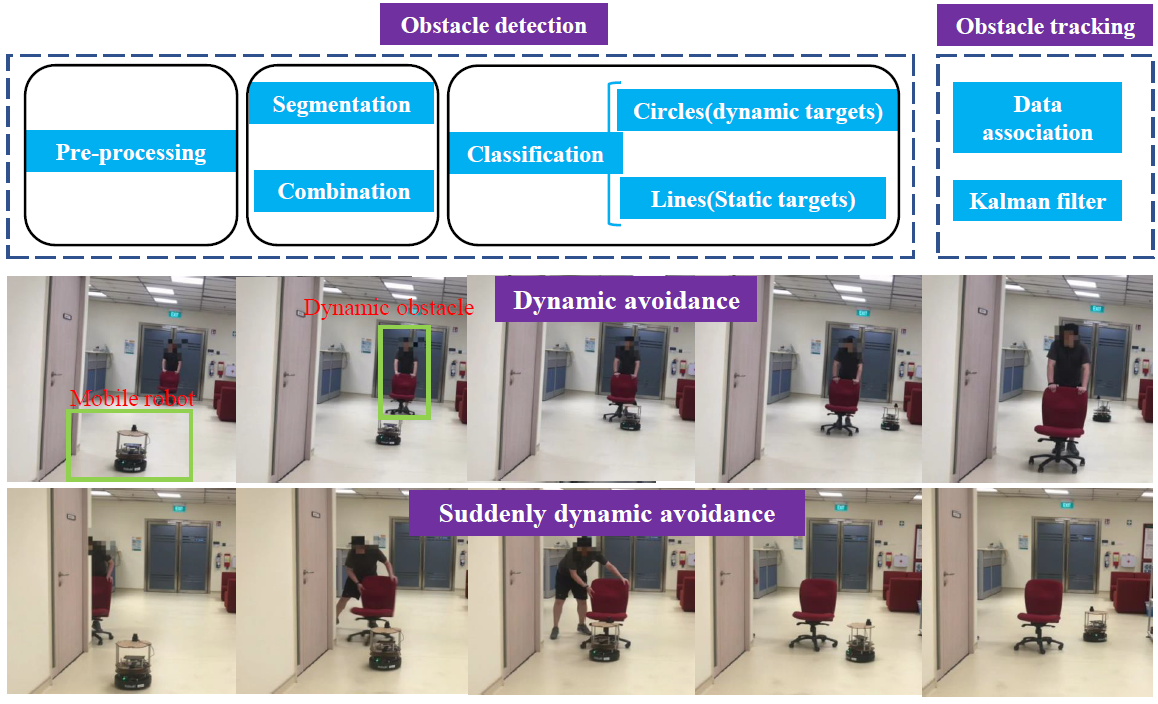
Real-time Avoidance Strategy of Dynamic Obstacles via Detection and Tracking with 2D Lidar for Mobile Robot
H. Dong, CY Weng, CQ Guo, H Yu, IM Chen.
IEEE/ASME Transactions on Mechatronics(T-MECH), 2020.
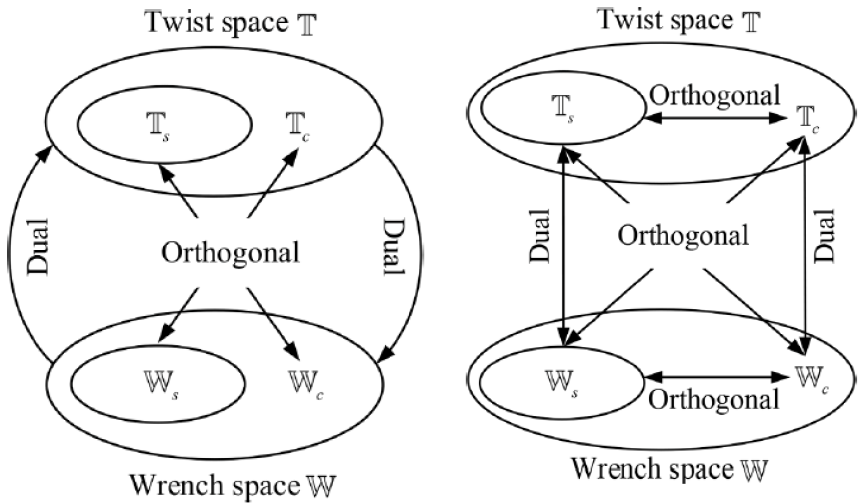
Repelling-screw-based geometrical interpretation of dualities of compliant mechanisms
H. Dong, K Wang, C Qiu, IM Chen, J Dai.
Mechanism and Machine Theory(MMT), 2021.
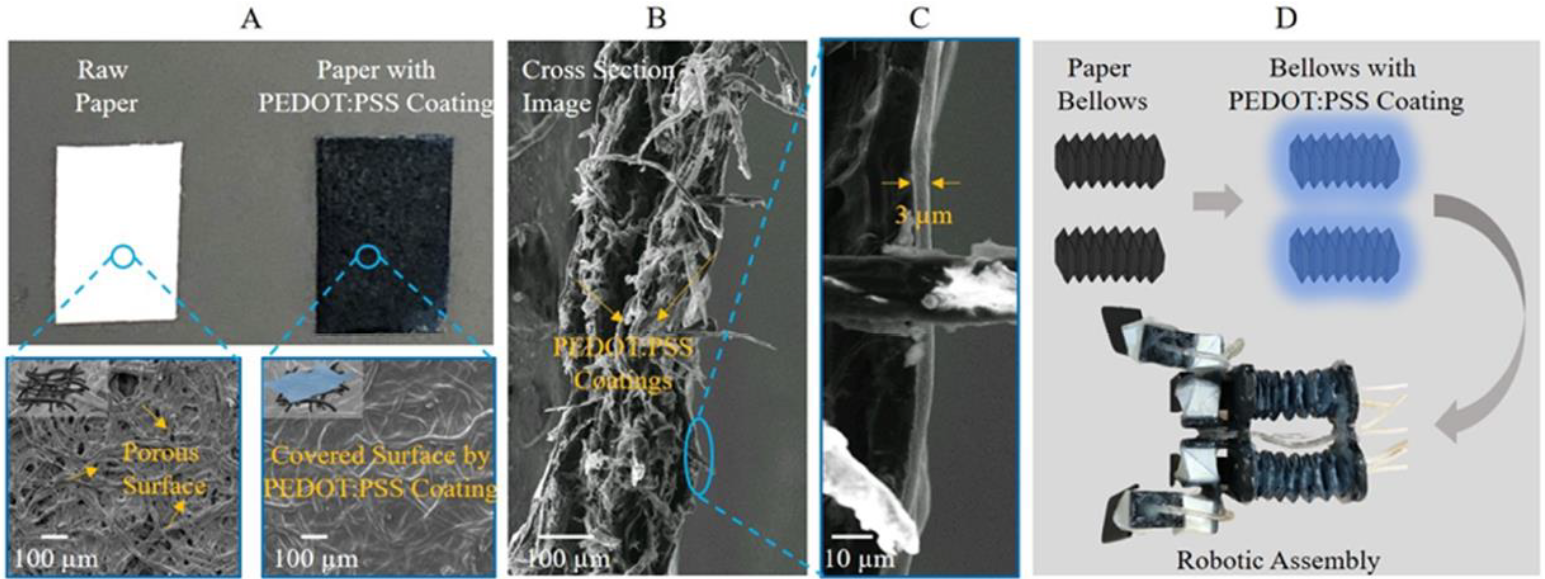
Bio-inspired Amphibious Origami Robot with Body Sensing for Multimodal Locomotion
H. Dong, HT Yang, S Ding, T Li, H Yu.
Soft Robotics(SORO), 2022.
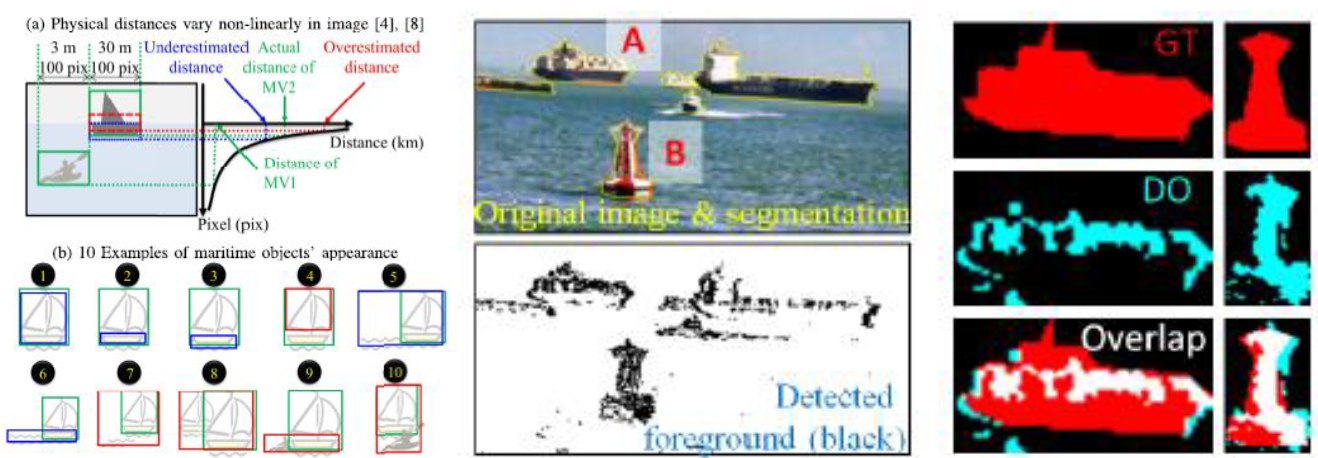
Are object detection assessment criteria ready for maritime computer vision?
DK. Prasad, H. Dong, Deepu Rajan, and Chai Quek.
IEEE Transactions on Intelligent Transportation Systems(TITS), 2019.
A Repelling-Screw-Based Approach for the Construction of Generalized Jacobian Matrices for Nonredundant Parallel Manipulators
Kun Wang, H. Dong, Emmanouil Spyrakos-Papastavridis, Chen Qiu, Jian S. Dai.
Mechanism and Machine Theory(MMT), 2022.
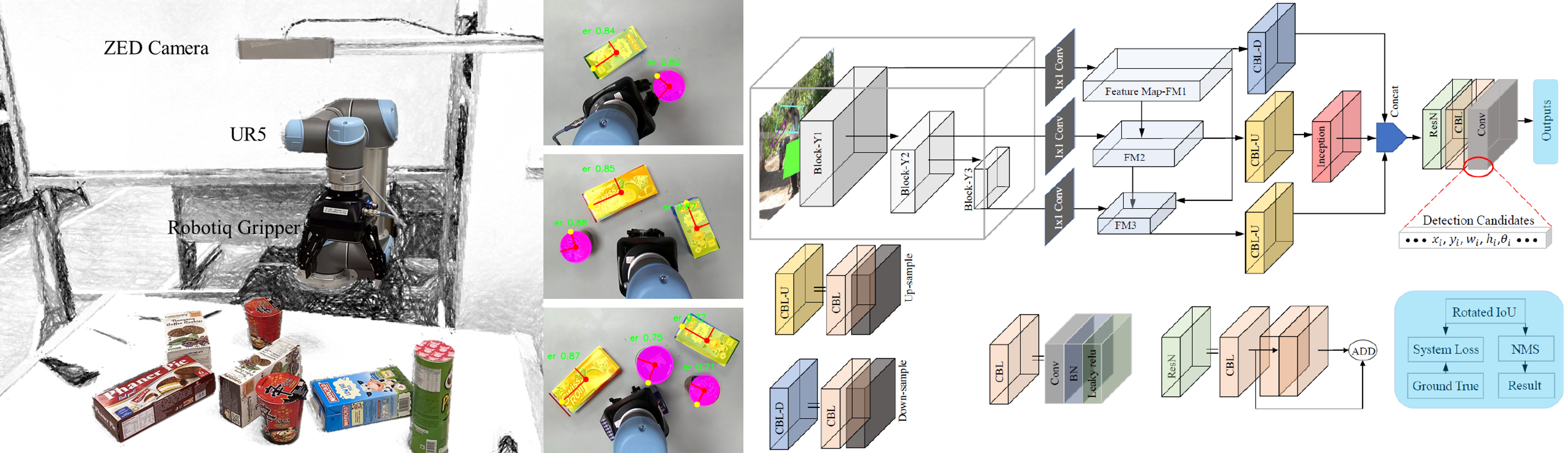
Robotic Grasps of Cylindrical and Cubic Objects via Real-Time Learning-based Shape Detection
H. Dong, J. Zhou, H. Yu.
IEEE Transactions on Automation Science and Engineering(T-ASE), 2024.
Conference papers
Construction of a Multiple-DOF Underactuated Gripper with Force-Sensing via Deep Learning
Jihao Li, Keqi Zhu, Guodong Lu, I-Ming Chen, H. Dong
Robotics: Science and Systems · A Robotics Conference(RSS), 2024.
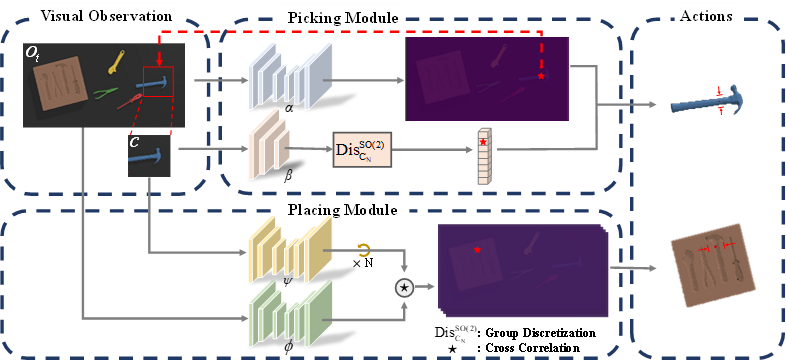
Discretizing SO (2)-Equivariant Features for Robotic Kitting
J. Zhou, Y. Zeng, H. Dong, IM. Chen.
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2024.
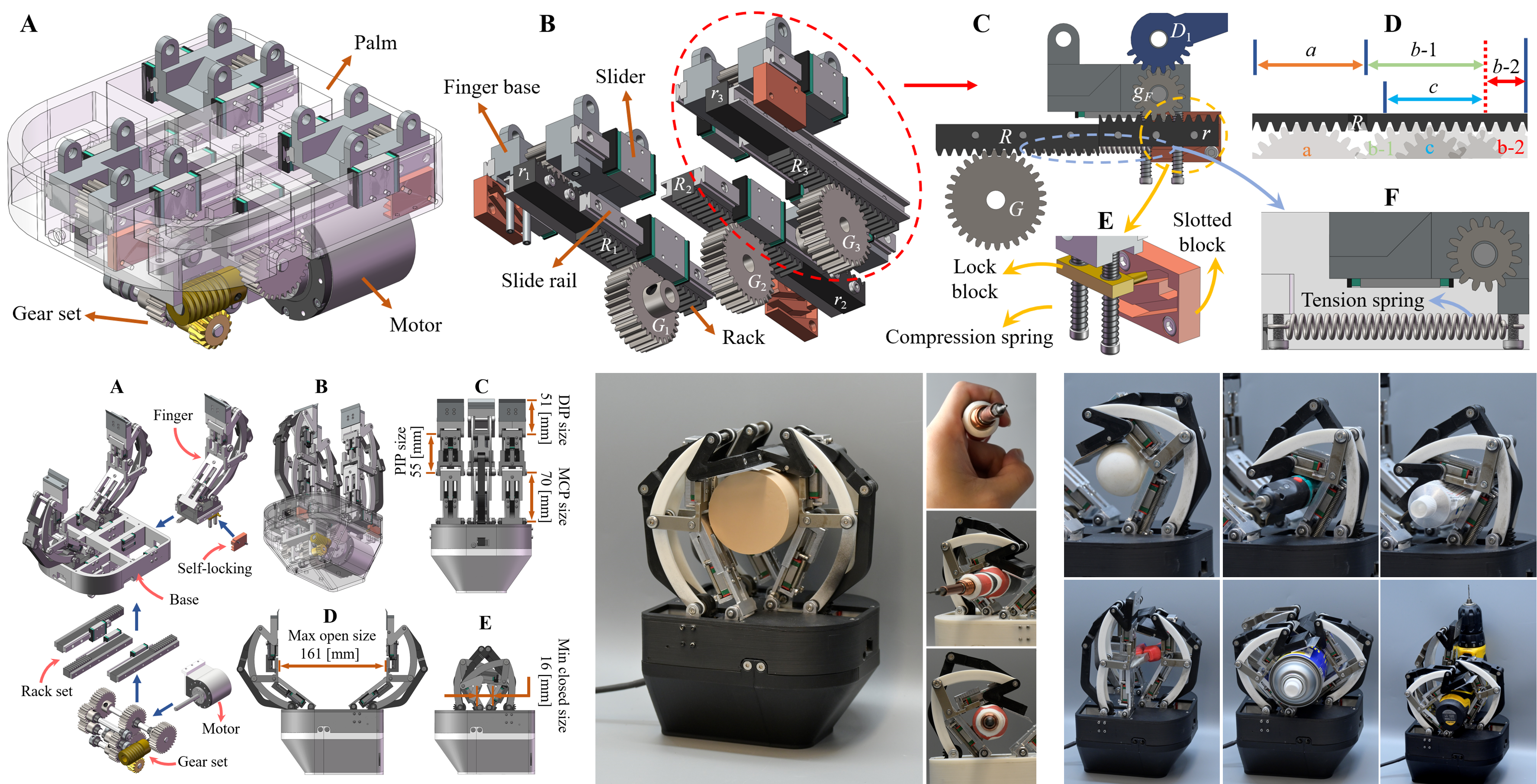
Under-actuated Robotic Gripper with Multiple Grasping Modes Inspired by Human Finger
J Li, T Liao, H Nigatu, H Guo, G Lu, H. Dong.
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2024.

Efficient Pose Estimation from Single RGB-D Image via Hough Forest with Auto-context
H. Dong, D. K. Prasad, Q.Yuan, J.Zhou, E.Asadi, IM. Chen.
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2018.
Fast Ellipse Detection for Robotic Manipulation of Cylindrical Objects
H. Dong, G.Sun, W.-C.Pang, E.Asadi, D.K.Prasad, IM. Chen
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS - RA-L), 2018.
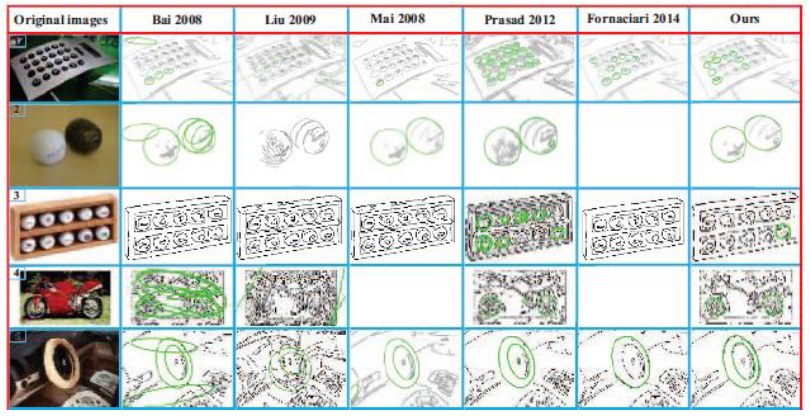
Robust Ellipse Detection Via Arc Segmentation and Arc Classification
H. Dong, IM. Chen, and D. K. Prasad
International Conference on Image Processing(ICIP), 2017.

Learning-based Ellipse Detection for RoboticGrasps of Cylinders and Ellipsoids
H. Dong, J Zhou, C Qiu, DK Prasad, IM. Chen.
IEEE International Conference on Robotics and Automation(ICRA), 2022.
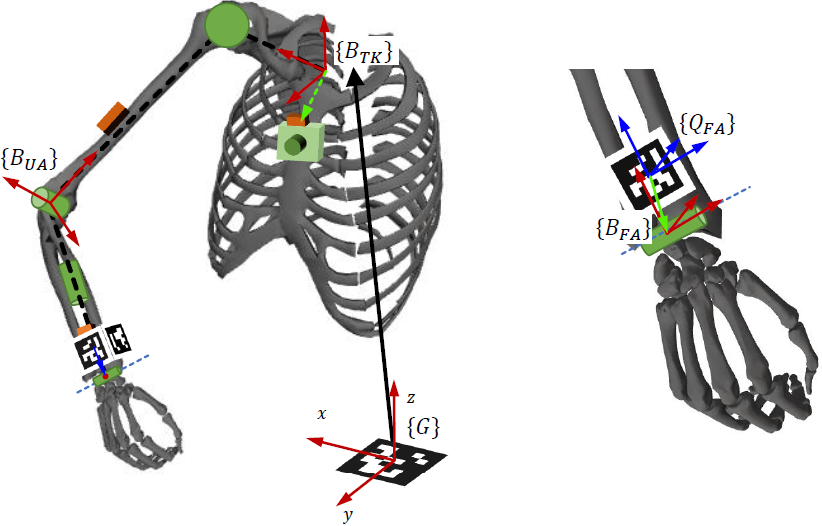
Estimation of Upper Limb Kinematics with a Magnetometer-Free Egocentric Visual-Inertial System
T Li, X Wu, H. Dong, Haoyong Yu.
IEEE International Conference on Robotics and Automation(ICRA), 2022.
Enabling Massage Actions : A n Interactive Parallel Robot with Compliant Joints
H. Dong, Y. Feng, C. Qiu, Y. Pan, M. He, IM. Chen.
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2022.
GSG: A Granary-shaped Soft Gripper with Mechanical Sensing via Snap-Through Structure
H. Dong, C.Y. Chen, C. Qiu, C.H. Yeow, H.Y. Yu.
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2022.
Grasp Lab
Constructing the Lab
• Current members

Huixu Dong, Principle Investigator(PI)

Jiadong Zhou, Ph.D. Student, my collaborator
at RRC of NTU, Singapore.
Robotic re-grasping

Yue Feng, Ph.D. Student, my collaborator
at RRC of NTU, Singapore.
Interactive robotic manipulation
• Robot buddies


Joining My Group
Target
It is well-known that a robotic grasping system significantly involves perception, modeling, gripper design and control, motion planning and materials, even emerging technologies such as VR and metaverse. Our research locates in those disciplines of robotic vision, mechatronics and motion planning. Our goal is to develop cutting-edge technologies of robotic perception and grasp to achieve domestic and industrial applications. To this end, we focus on (1) developing grippers with new concepts, new design, new control, new actuator, and new material; (2) studying real-time shape-based and 3D perceptions via mathematical modeling and machine learning; (3) investigating safe, interactive motion planning and grasping synthesis; (4) exploring supervision learning for robots commanding skills. Currently, we are working on robotic tidying, packaging, assembling, picking, placing, and re-grasping projects.
Supervising statement
The Grasp Lab is committed to fostering creativity, opening, inclusion, and collaboration among our members with diverse backgrounds. We strive to offer supportive environments for students to implement any novel ideas that break research borders, regardless of specific-purpose applications.Our lab highly encourages students to cooperate with other groups since robotics research is an interdisciplinary and collaborative endeavor. For each incoming member, we advise a suitable research direction and also, have a weekly meeting with each member. We set up a weekly meeting to inspire brainstorming, discuss literature studies and research ideas. Generally, we will allow students to do visiting students overseas such as RRC at NTU in Singapore, RI at CMU in United States, and some universities in Norway, Australia, England, Japan, and Finland.